 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast, Smooth, and Safe: Implicit Control Barrier Functions through Reach-Avoid Differential Dynamic Programming
Jul 01, 2023Safety is a central requirement for autonomous system operation across domains. Hamilton-Jacobi (HJ) reachability analysis can be used to construct "least-restrictive" safety filters that result in infrequent, but often extreme, control overrides. In contrast, control barrier function (CBF) methods apply smooth control corrections to guard the system against an often conservative safety boundary. This paper provides an online scheme to construct an implicit CBF through HJ reach-avoid differential dynamic programming in a receding-horizon framework, enabling smooth safety filtering with infinite-time safety guarantees. Simulations with the Dubins car and 5D bicycle dynamics demonstrate the scheme's ability to preserve safety smoothly without the conservativeness of handcrafted CBFs.
Malleable Agents for Re-Configurable Robotic Manipulators
Feb 04, 2022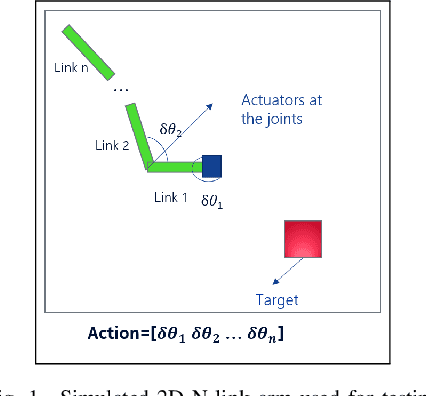
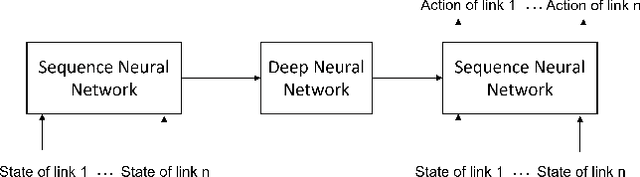
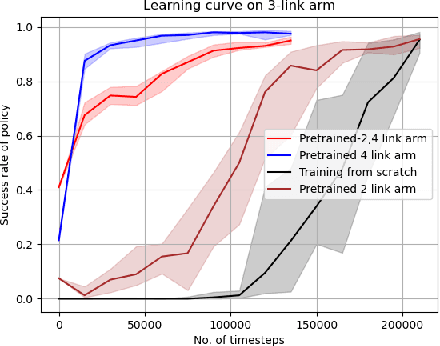
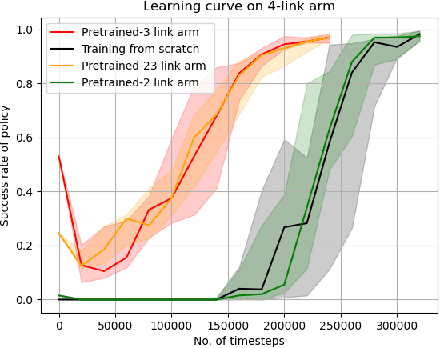
Re-configurable robots potentially have more utility and flexibility for many real-world tasks. Designing a learning agent to operate such robots requires adapting to different configurations. While deep reinforcement learning has had immense success in robotic manipulation, domain adaptation is a significant problem that limits its applicability to real-world robotics. We focus on robotic arms with multiple rigid links connected by joints. Recent attempts have performed domain adaptation and Sim2Real transfer to provide robustness to robotic arm dynamics and sensor/camera variations. However, there have been no previous attempts to adapt to robotic arms with a varying number of links. We propose an RL agent with sequence neural networks embedded in the deep neural network to adapt to robotic arms that have a varying number of links. Further, with the additional tool of domain randomization, this agent adapts to different configurations with varying number/length of links and dynamics noise. We perform simulations on a 2D N-link arm to show the ability of our network to transfer and generalize efficiently.
ProBF: Learning Probabilistic Safety Certificates with Barrier Functions
Dec 24, 2021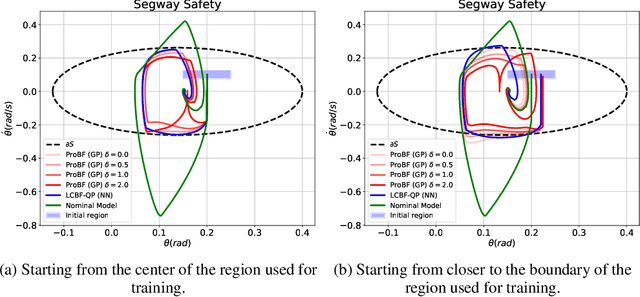
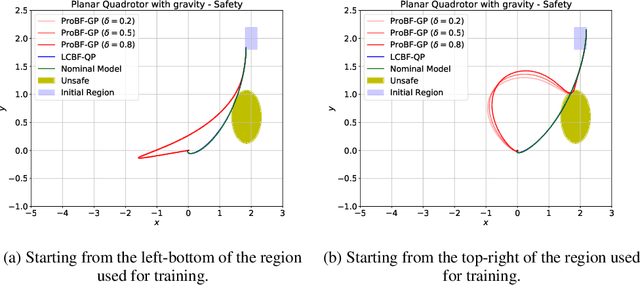
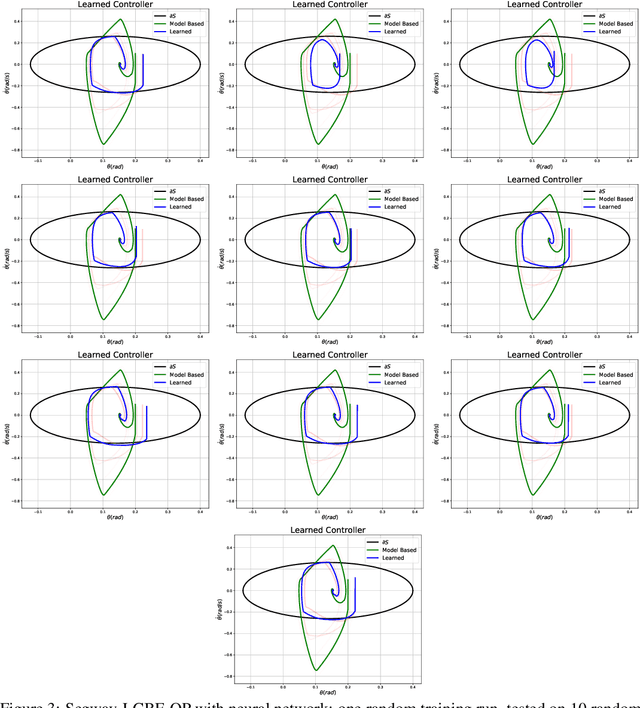
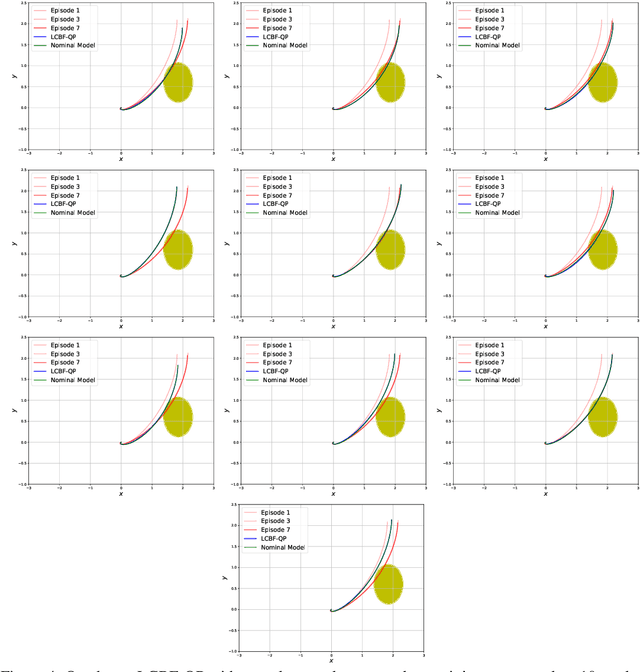
Safety-critical applications require controllers/policies that can guarantee safety with high confidence. The control barrier function is a useful tool to guarantee safety if we have access to the ground-truth system dynamics. In practice, we have inaccurate knowledge of the system dynamics, which can lead to unsafe behaviors due to unmodeled residual dynamics. Learning the residual dynamics with deterministic machine learning models can prevent the unsafe behavior but can fail when the predictions are imperfect. In this situation, a probabilistic learning method that reasons about the uncertainty of its predictions can help provide robust safety margins. In this work, we use a Gaussian process to model the projection of the residual dynamics onto a control barrier function. We propose a novel optimization procedure to generate safe controls that can guarantee safety with high probability. The safety filter is provided with the ability to reason about the uncertainty of the predictions from the GP. We show the efficacy of this method through experiments on Segway and Quadrotor simulations. Our proposed probabilistic approach is able to reduce the number of safety violations significantly as compared to the deterministic approach with a neural network.
DiffLoop: Tuning PID controllers by differentiating through the feedback loop
Jun 19, 2021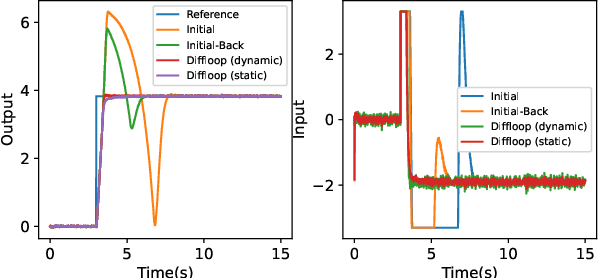
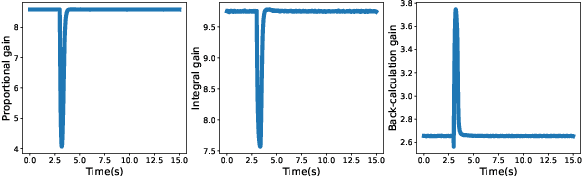
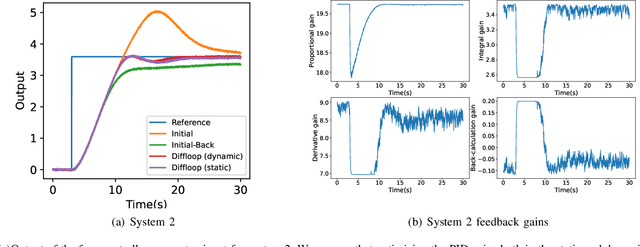
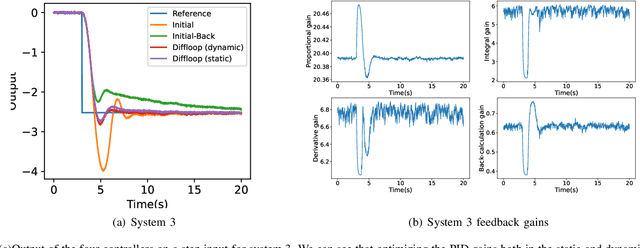
Since most industrial control applications use PID controllers, PID tuning and anti-windup measures are significant problems. This paper investigates tuning the feedback gains of a PID controller via back-calculation and automatic differentiation tools. In particular, we episodically use a cost function to generate gradients and perform gradient descent to improve controller performance. We provide a theoretical framework for analyzing this non-convex optimization and establish a relationship between back-calculation and disturbance feedback policies. We include numerical experiments on linear systems with actuator saturation to show the efficacy of this approach.
Pack and Detect: Fast Object Detection in Videos Using Region-of-Interest Packing
Oct 01, 2018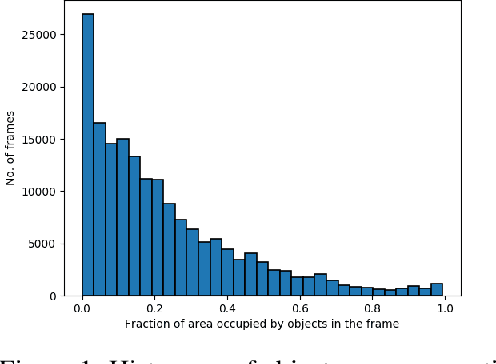
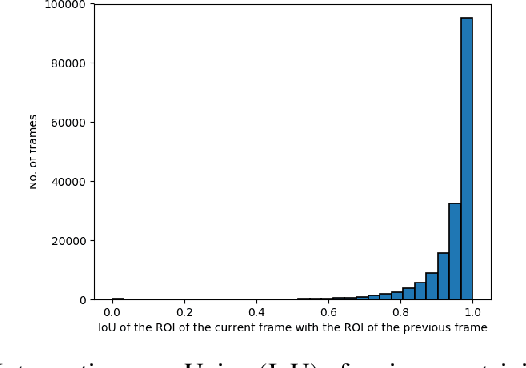
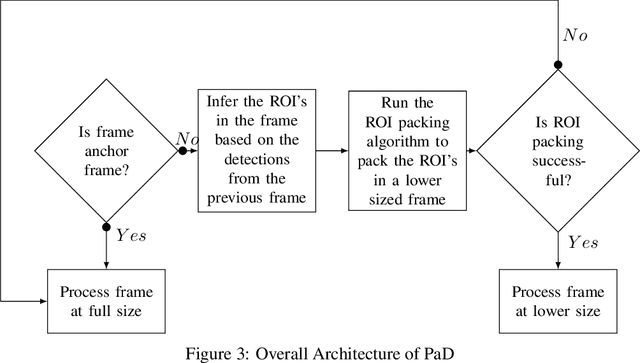
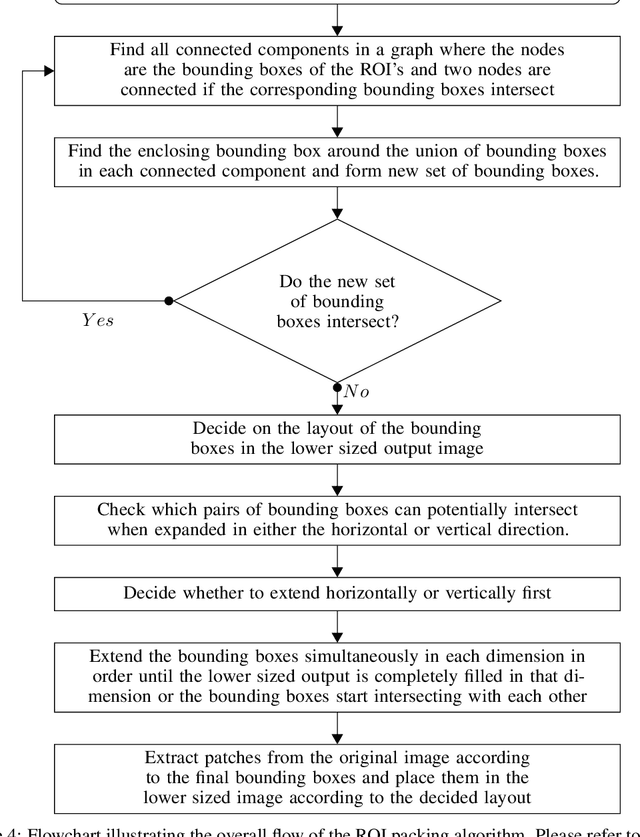
Object detection in videos is an important task in computer vision for various applications such as object tracking, video summarization and video search. Although great progress has been made in improving the accuracy of object detection in recent years due to improved techniques for training and deploying deep neural networks, they are computationally very intensive. For example, processing a video at 300x300 resolution using the SSD300 (Single Shot Detector) object detection network with VGG16 as backbone at 30 fps requires 1.87 trillion FLOPS/s. In order to address this challenge, we make two important observations in the context of videos. In some scenarios, most of the regions in a video frame are background and the salient objects occupy only a small fraction of the area in the frame. Further, in a video, there is a strong temporal correlation between consecutive frames. Based on these observations, we propose Pack and Detect (PaD) to reduce the computational requirements for the task of object detection in videos using neural networks. In PaD, the input video frame is processed at full size in selected frames called anchor frames. In the frames between the anchor frames, namely inter-anchor frames, the regions of interest(ROI) are identified based on the detections in the previous frame. We propose an algorithm to pack the ROI's of each inter-anchor frame together in a lower sized frame. In order to maintain the accuracy of object detection, the proposed algorithm expands the ROI's greedily to provide more background information to the detector. The computational requirements are reduced due to the lower size of the input. This method can potentially reduce the number of FLOPS required for a frame by 4x. Tuning the algorithm parameters can provide a 1.3x increase in throughput with only a 2.5% drop in accuracy.