Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiffLoop: Tuning PID controllers by differentiating through the feedback loop
Paper and Code
Jun 19, 2021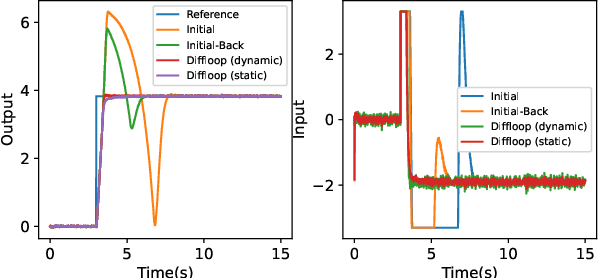
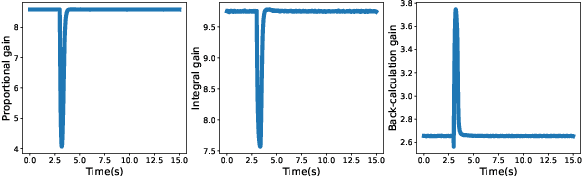
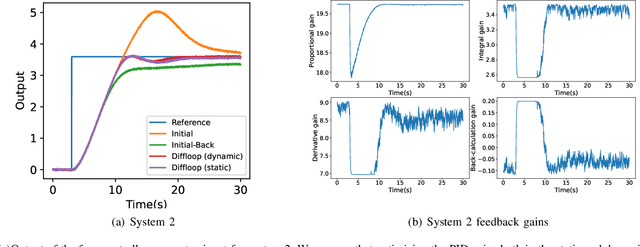
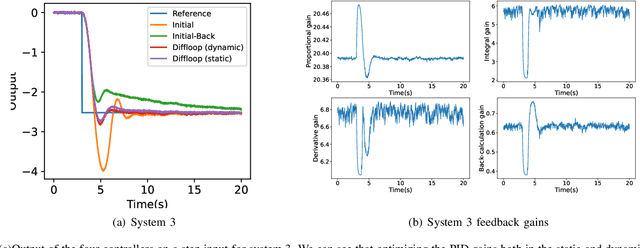
Since most industrial control applications use PID controllers, PID tuning and anti-windup measures are significant problems. This paper investigates tuning the feedback gains of a PID controller via back-calculation and automatic differentiation tools. In particular, we episodically use a cost function to generate gradients and perform gradient descent to improve controller performance. We provide a theoretical framework for analyzing this non-convex optimization and establish a relationship between back-calculation and disturbance feedback policies. We include numerical experiments on linear systems with actuator saturation to show the efficacy of this approach.
* Extension of paper in 2021 55th Annual Conference on Information
Sciences and Systems (CISS). IEEE, 2021
View paper on