 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Behavior-aware Control of Automated Vehicles at Crosswalks using Minimal Information Pedestrian Prediction Model
Mar 22, 2020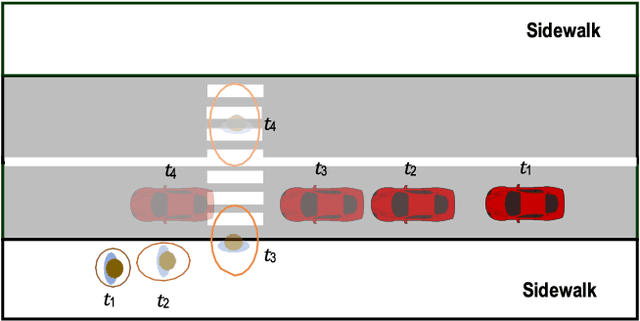


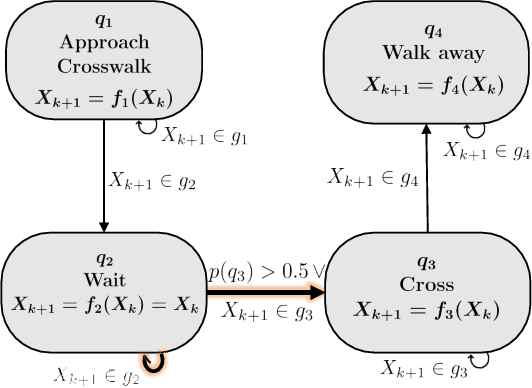
For automated vehicles (AVs) to reliably navigate through crosswalks, they need to understand pedestrians crossing behaviors. Simple and reliable pedestrian behavior models aid in real-time AV control by allowing the AVs to predict future pedestrian behaviors. In this paper, we present a Behavior aware Model Predictive Controller (B-MPC) for AVs that incorporates long-term predictions of pedestrian crossing behavior using a previously developed pedestrian crossing model. The model incorporates pedestrians gap acceptance behavior and utilizes minimal pedestrian information, namely their position and speed, to predict pedestrians crossing behaviors. The BMPC controller is validated through simulations and compared to a rule-based controller. By incorporating predictions of pedestrian behavior, the B-MPC controller is able to efficiently plan for longer horizons and handle a wider range of pedestrian interaction scenarios than the rule-based controller. Results demonstrate the applicability of the controller for safe and efficient navigation at crossing scenarios.
Analysis and Prediction of Pedestrian Crosswalk Behavior during Automated Vehicle Interactions
Mar 22, 2020
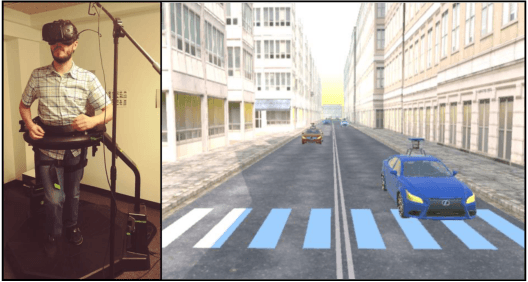
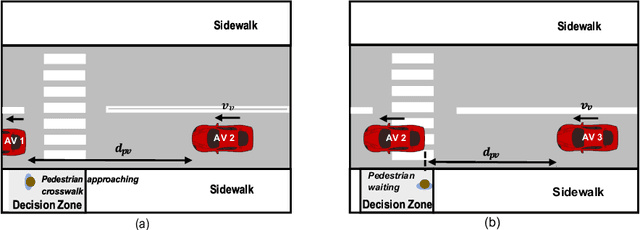
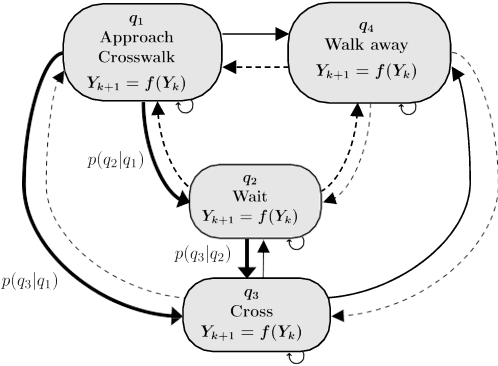
For safe navigation around pedestrians, automated vehicles (AVs) need to plan their motion by accurately predicting pedestrians trajectories over long time horizons. Current approaches to AV motion planning around crosswalks predict only for short time horizons (1-2 s) and are based on data from pedestrian interactions with human-driven vehicles (HDVs). In this paper, we develop a hybrid systems model that uses pedestrians gap acceptance behavior and constant velocity dynamics for long-term pedestrian trajectory prediction when interacting with AVs. Results demonstrate the applicability of the model for long-term (> 5 s) pedestrian trajectory prediction at crosswalks. Further we compared measures of pedestrian crossing behaviors in the immersive virtual environment (when interacting with AVs) to that in the real world (results of published studies of pedestrians interacting with HDVs), and found similarities between the two. These similarities demonstrate the applicability of the hybrid model of AV interactions developed from an immersive virtual environment (IVE) for real-world scenarios for both AVs and HDVs.
Examining the Effects of Emotional Valence and Arousal on Takeover Performance in Conditionally Automated Driving
Jan 13, 2020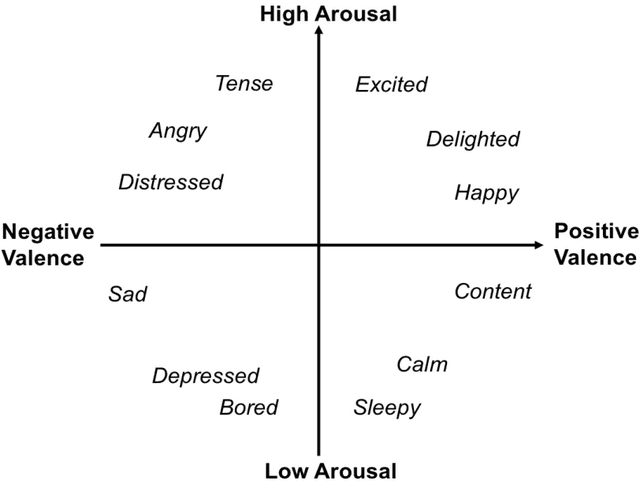
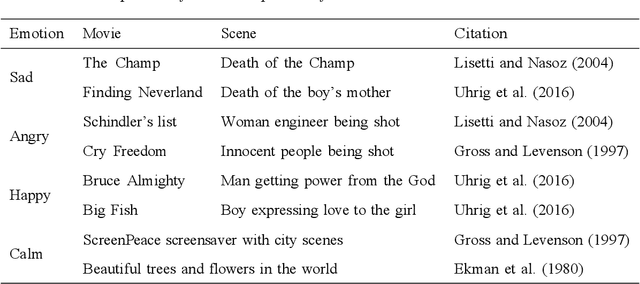
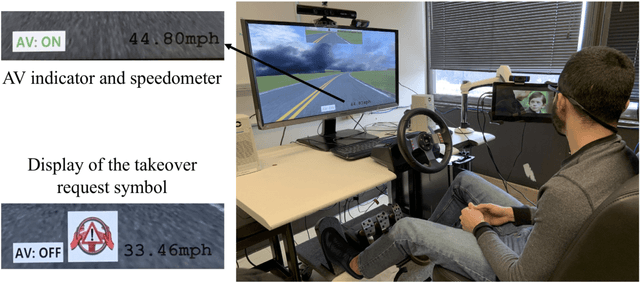
In conditionally automated driving, drivers have difficulty in takeover transitions as they become increasingly decoupled from the operational level of driving. Factors influencing takeover performance, such as takeover lead time and the engagement of non-driving related tasks, have been studied in the past. However, despite the important role emotions play in human-machine interaction and in manual driving, little is known about how emotions influence drivers takeover performance. This study, therefore, examined the effects of emotional valence and arousal on drivers takeover timeliness and quality in conditionally automated driving. We conducted a driving simulation experiment with 32 participants. Movie clips were played for emotion induction. Participants with different levels of emotional valence and arousal were required to take over control from automated driving, and their takeover time and quality were analyzed. Results indicate that positive valence led to better takeover quality in the form of a smaller maximum resulting acceleration and a smaller maximum resulting jerk. However, high arousal did not yield an advantage in takeover time. This study contributes to the literature by demonstrating how emotional valence and arousal affect takeover performance. The benefits of positive emotions carry over from manual driving to conditionally automated driving while the benefits of arousal do not.
Look Who's Talking Now: Implications of AV's Explanations on Driver's Trust, AV Preference, Anxiety and Mental Workload
May 21, 2019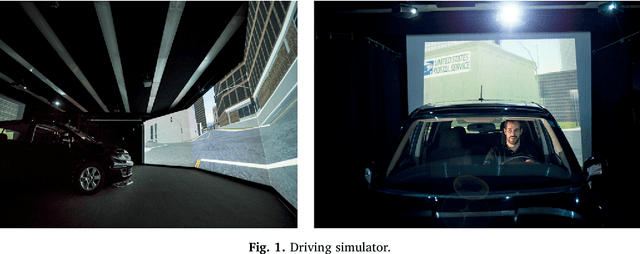
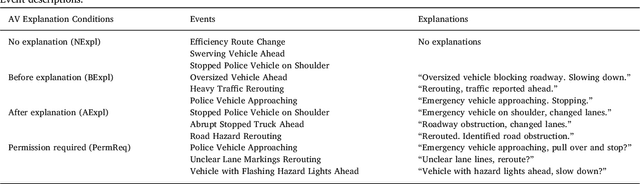
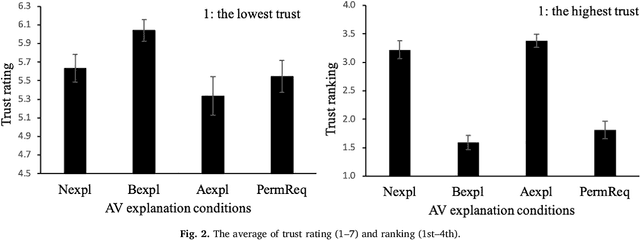
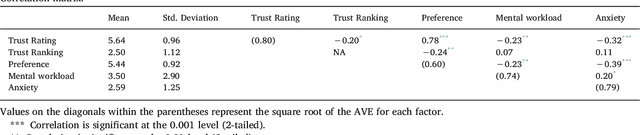
Explanations given by automation are often used to promote automation adoption. However, it remains unclear whether explanations promote acceptance of automated vehicles (AVs). In this study, we conducted a within-subject experiment in a driving simulator with 32 participants, using four different conditions. The four conditions included: (1) no explanation, (2) explanation given before or (3) after the AV acted and (4) the option for the driver to approve or disapprove the AV's action after hearing the explanation. We examined four AV outcomes: trust, preference for AV, anxiety and mental workload. Results suggest that explanations provided before an AV acted were associated with higher trust in and preference for the AV, but there was no difference in anxiety and workload. These results have important implications for the adoption of AVs.