 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnderstanding Robot Minds: Leveraging Machine Teaching for Transparent Human-Robot Collaboration Across Diverse Groups
Apr 23, 2024



In this work, we aim to improve transparency and efficacy in human-robot collaboration by developing machine teaching algorithms suitable for groups with varied learning capabilities. While previous approaches focused on tailored approaches for teaching individuals, our method teaches teams with various compositions of diverse learners using team belief representations to address personalization challenges within groups. We investigate various group teaching strategies, such as focusing on individual beliefs or the group's collective beliefs, and assess their impact on learning robot policies for different team compositions. Our findings reveal that team belief strategies yield less variation in learning duration and better accommodate diverse teams compared to individual belief strategies, suggesting their suitability in mixed-proficiency settings with limited resources. Conversely, individual belief strategies provide a more uniform knowledge level, particularly effective for homogeneously inexperienced groups. Our study indicates that the teaching strategy's efficacy is significantly influenced by team composition and learner proficiency, highlighting the importance of real-time assessment of learner proficiency and adapting teaching approaches based on learner proficiency for optimal teaching outcomes.
Efficient Behavior-aware Control of Automated Vehicles at Crosswalks using Minimal Information Pedestrian Prediction Model
Mar 22, 2020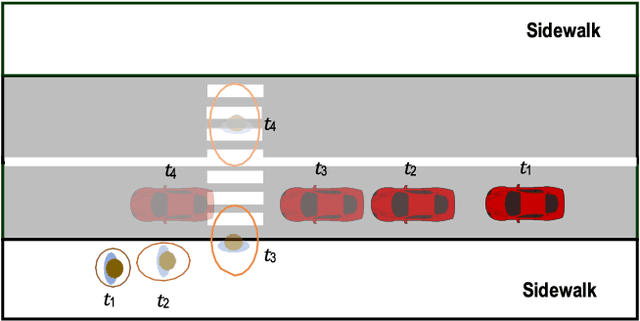


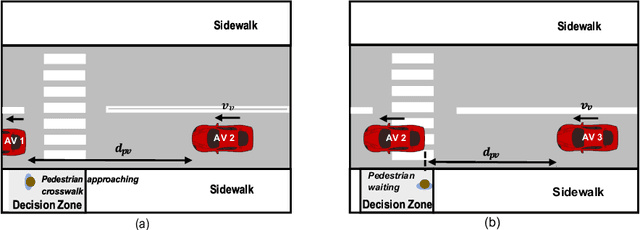
For automated vehicles (AVs) to reliably navigate through crosswalks, they need to understand pedestrians crossing behaviors. Simple and reliable pedestrian behavior models aid in real-time AV control by allowing the AVs to predict future pedestrian behaviors. In this paper, we present a Behavior aware Model Predictive Controller (B-MPC) for AVs that incorporates long-term predictions of pedestrian crossing behavior using a previously developed pedestrian crossing model. The model incorporates pedestrians gap acceptance behavior and utilizes minimal pedestrian information, namely their position and speed, to predict pedestrians crossing behaviors. The BMPC controller is validated through simulations and compared to a rule-based controller. By incorporating predictions of pedestrian behavior, the B-MPC controller is able to efficiently plan for longer horizons and handle a wider range of pedestrian interaction scenarios than the rule-based controller. Results demonstrate the applicability of the controller for safe and efficient navigation at crossing scenarios.
Analysis and Prediction of Pedestrian Crosswalk Behavior during Automated Vehicle Interactions
Mar 22, 2020
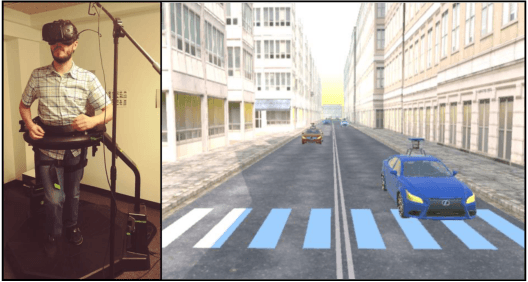
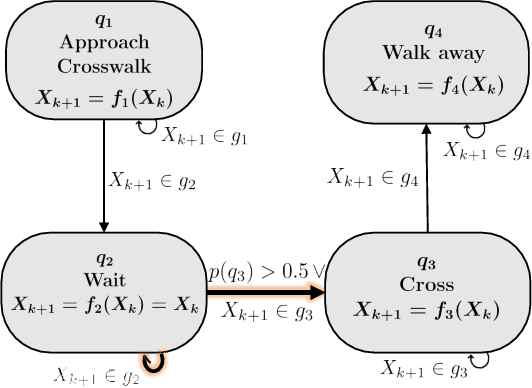
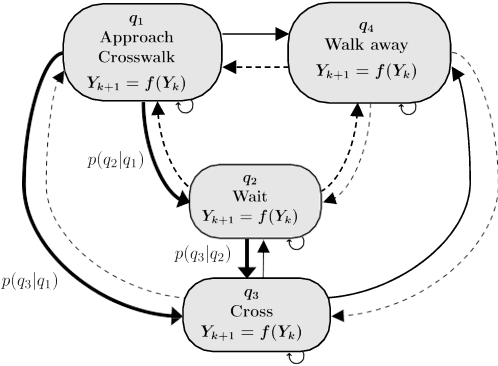
For safe navigation around pedestrians, automated vehicles (AVs) need to plan their motion by accurately predicting pedestrians trajectories over long time horizons. Current approaches to AV motion planning around crosswalks predict only for short time horizons (1-2 s) and are based on data from pedestrian interactions with human-driven vehicles (HDVs). In this paper, we develop a hybrid systems model that uses pedestrians gap acceptance behavior and constant velocity dynamics for long-term pedestrian trajectory prediction when interacting with AVs. Results demonstrate the applicability of the model for long-term (> 5 s) pedestrian trajectory prediction at crosswalks. Further we compared measures of pedestrian crossing behaviors in the immersive virtual environment (when interacting with AVs) to that in the real world (results of published studies of pedestrians interacting with HDVs), and found similarities between the two. These similarities demonstrate the applicability of the hybrid model of AV interactions developed from an immersive virtual environment (IVE) for real-world scenarios for both AVs and HDVs.