 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConsiderations for Task Allocation in Human-Robot Teams
Oct 06, 2022In human-robot teams where agents collaborate together, there needs to be a clear allocation of tasks to agents. Task allocation can aid in achieving the presumed benefits of human-robot teams, such as improved team performance. Many task allocation methods have been proposed that include factors such as agent capability, availability, workload, fatigue, and task and domain-specific parameters. In this paper, selected work on task allocation is reviewed. In addition, some areas for continued and further consideration in task allocation are discussed. These areas include level of collaboration, novel tasks, unknown and dynamic agent capabilities, negotiation and fairness, and ethics. Where applicable, we also mention some of our work on task allocation. Through continued efforts and considerations in task allocation, human-robot teaming can be improved.
Using Trust for Heterogeneous Human-Robot Team Task Allocation
Oct 08, 2021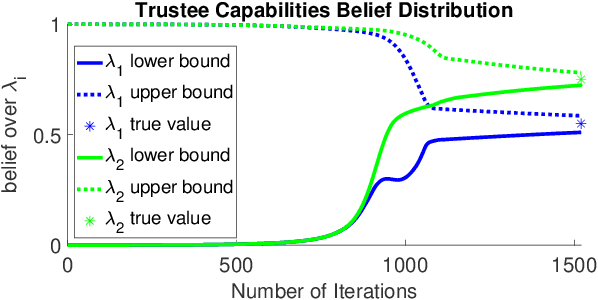
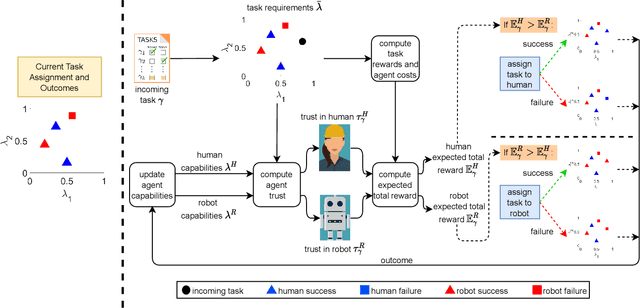
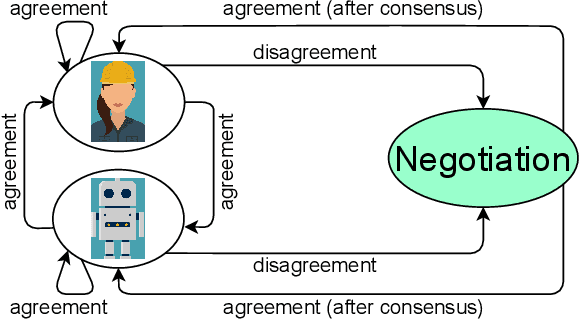
Human-robot teams have the ability to perform better across various tasks than human-only and robot-only teams. However, such improvements cannot be realized without proper task allocation. Trust is an important factor in teaming relationships, and can be used in the task allocation strategy. Despite the importance, most existing task allocation strategies do not incorporate trust. This paper reviews select studies on trust and task allocation. We also summarize and discuss how a bi-directional trust model can be used for a task allocation strategy. The bi-directional trust model represents task requirements and agents by their capabilities, and can be used to predict trust for both existing and new tasks. Our task allocation approach uses predicted trust in the agent and expected total reward for task assignment. Finally, we present some directions for future work, including the incorporation of trust from the human and human capacity for task allocation, and a negotiation phase for resolving task disagreements.
From the Head or the Heart? An Experimental Design on the Impact of Explanation on Cognitive and Affective Trust
Oct 07, 2021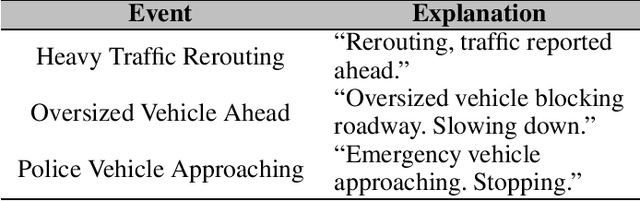
Automated vehicles (AVs) are social robots that can potentially benefit our society. According to the existing literature, AV explanations can promote passengers' trust by reducing the uncertainty associated with the AV's reasoning and actions. However, the literature on AV explanations and trust has failed to consider how the type of trust - cognitive versus affective - might alter this relationship. Yet, the existing literature has shown that the implications associated with trust vary widely depending on whether it is cognitive or affective. To address this shortcoming and better understand the impacts of explanations on trust in AVs, we designed a study to investigate the effectiveness of explanations on both cognitive and affective trust. We expect these results to be of great significance in designing AV explanations to promote AV trust.
Analysis and Prediction of Pedestrian Crosswalk Behavior during Automated Vehicle Interactions
Mar 22, 2020
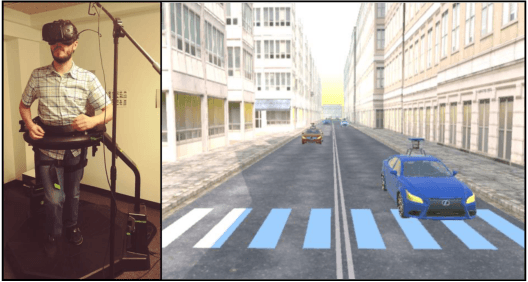
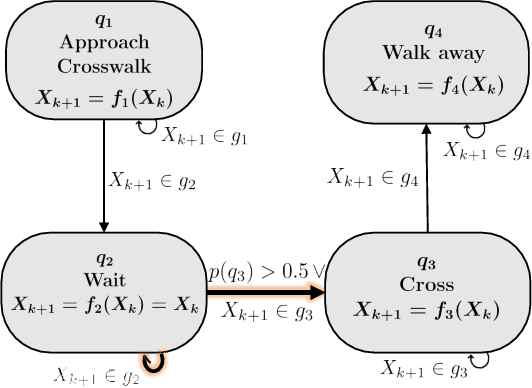
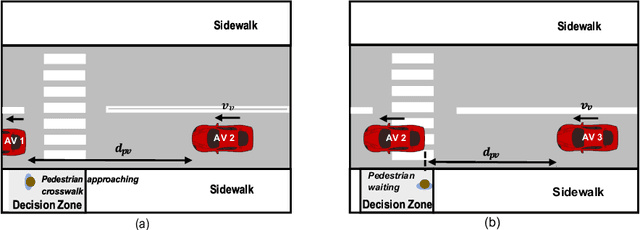
For safe navigation around pedestrians, automated vehicles (AVs) need to plan their motion by accurately predicting pedestrians trajectories over long time horizons. Current approaches to AV motion planning around crosswalks predict only for short time horizons (1-2 s) and are based on data from pedestrian interactions with human-driven vehicles (HDVs). In this paper, we develop a hybrid systems model that uses pedestrians gap acceptance behavior and constant velocity dynamics for long-term pedestrian trajectory prediction when interacting with AVs. Results demonstrate the applicability of the model for long-term (> 5 s) pedestrian trajectory prediction at crosswalks. Further we compared measures of pedestrian crossing behaviors in the immersive virtual environment (when interacting with AVs) to that in the real world (results of published studies of pedestrians interacting with HDVs), and found similarities between the two. These similarities demonstrate the applicability of the hybrid model of AV interactions developed from an immersive virtual environment (IVE) for real-world scenarios for both AVs and HDVs.
An Automated Vehicle like Me? The Impact of Personality Similarities and Differences between Humans and AVs
Sep 11, 2019
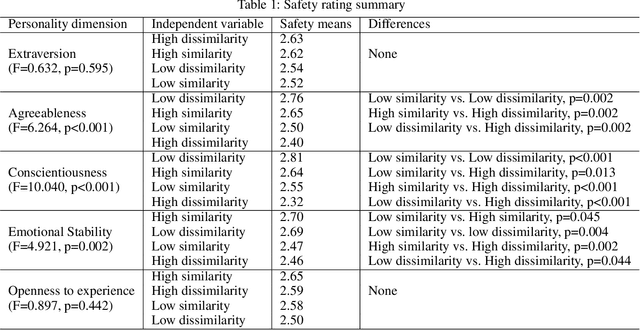
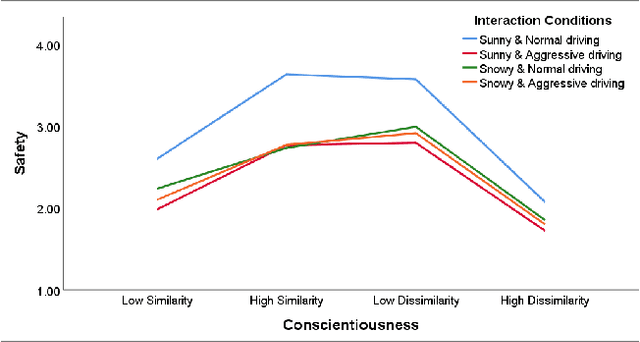
To better understand the impacts of similarities and dissimilarities in human and AV personalities we conducted an experimental study with 443 individuals. Generally, similarities in human and AV personalities led to a higher perception of AV safety only when both were high in specific personality traits. Dissimilarities in human and AV personalities also yielded a higher perception of AV safety, but only when the AV was higher than the human in a particular personality trait.
Look Who's Talking Now: Implications of AV's Explanations on Driver's Trust, AV Preference, Anxiety and Mental Workload
May 21, 2019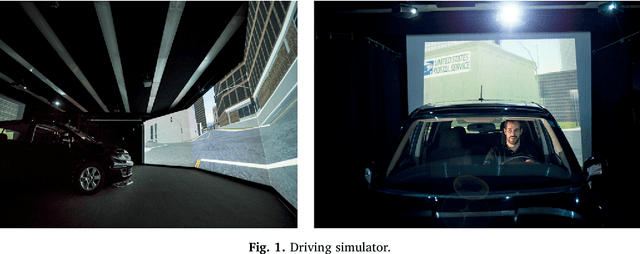
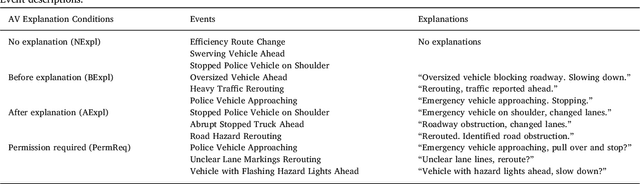
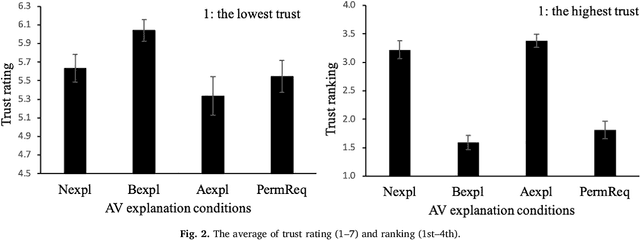
Explanations given by automation are often used to promote automation adoption. However, it remains unclear whether explanations promote acceptance of automated vehicles (AVs). In this study, we conducted a within-subject experiment in a driving simulator with 32 participants, using four different conditions. The four conditions included: (1) no explanation, (2) explanation given before or (3) after the AV acted and (4) the option for the driver to approve or disapprove the AV's action after hearing the explanation. We examined four AV outcomes: trust, preference for AV, anxiety and mental workload. Results suggest that explanations provided before an AV acted were associated with higher trust in and preference for the AV, but there was no difference in anxiety and workload. These results have important implications for the adoption of AVs.