 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSlanted Stixels: A way to represent steep streets
Oct 02, 2019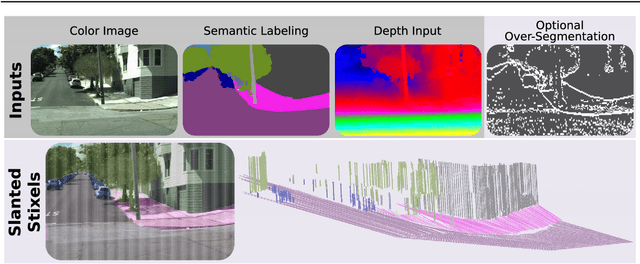
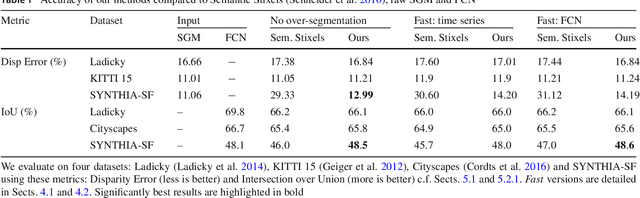
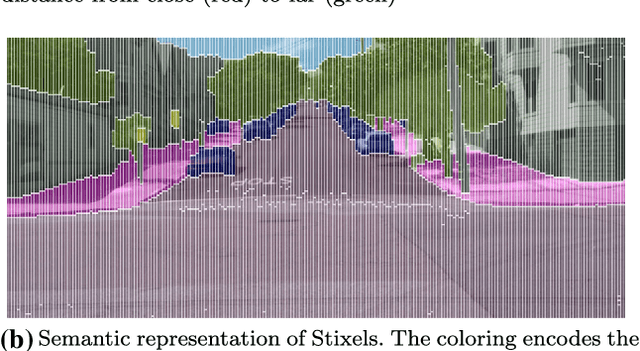
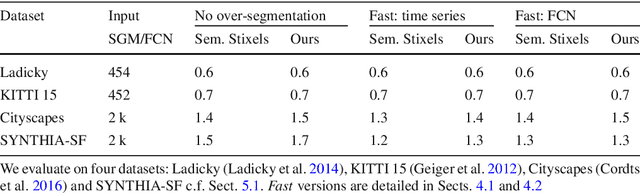
This work presents and evaluates a novel compact scene representation based on Stixels that infers geometric and semantic information. Our approach overcomes the previous rather restrictive geometric assumptions for Stixels by introducing a novel depth model to account for non-flat roads and slanted objects. Both semantic and depth cues are used jointly to infer the scene representation in a sound global energy minimization formulation. Furthermore, a novel approximation scheme is introduced in order to significantly reduce the computational complexity of the Stixel algorithm, and then achieve real-time computation capabilities. The idea is to first perform an over-segmentation of the image, discarding the unlikely Stixel cuts, and apply the algorithm only on the remaining Stixel cuts. This work presents a novel over-segmentation strategy based on a Fully Convolutional Network (FCN), which outperforms an approach based on using local extrema of the disparity map. We evaluate the proposed methods in terms of semantic and geometric accuracy as well as run-time on four publicly available benchmark datasets. Our approach maintains accuracy on flat road scene datasets while improving substantially on a novel non-flat road dataset.
* Journal preprint (published in IJCV 2019: https://link.springer.com/article/10.1007/s11263-019-01226-9). arXiv admin note: text overlap with arXiv:1707.05397
Slanted Stixels: Representing San Francisco's Steepest Streets
Jul 17, 2017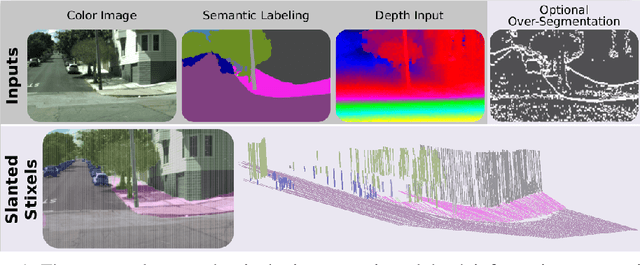
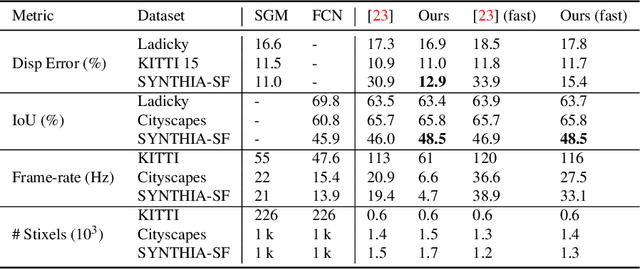
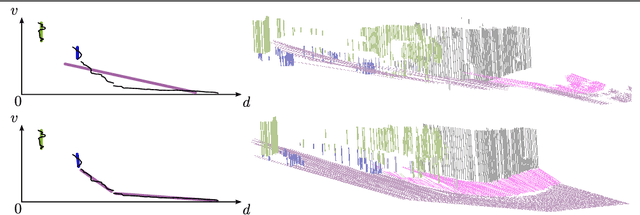
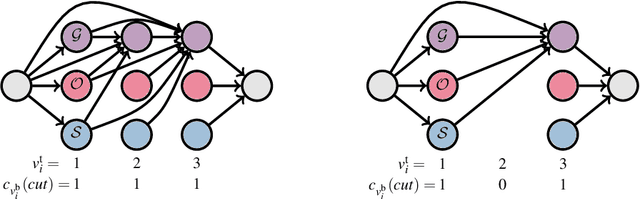
In this work we present a novel compact scene representation based on Stixels that infers geometric and semantic information. Our approach overcomes the previous rather restrictive geometric assumptions for Stixels by introducing a novel depth model to account for non-flat roads and slanted objects. Both semantic and depth cues are used jointly to infer the scene representation in a sound global energy minimization formulation. Furthermore, a novel approximation scheme is introduced that uses an extremely efficient over-segmentation. In doing so, the computational complexity of the Stixel inference algorithm is reduced significantly, achieving real-time computation capabilities with only a slight drop in accuracy. We evaluate the proposed approach in terms of semantic and geometric accuracy as well as run-time on four publicly available benchmark datasets. Our approach maintains accuracy on flat road scene datasets while improving substantially on a novel non-flat road dataset.
GPU-based Pedestrian Detection for Autonomous Driving
Nov 05, 2016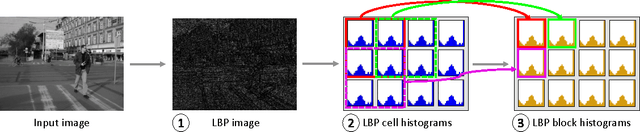
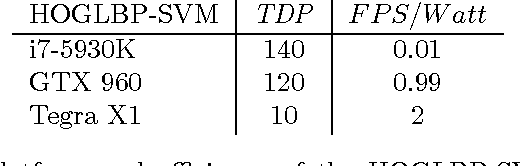
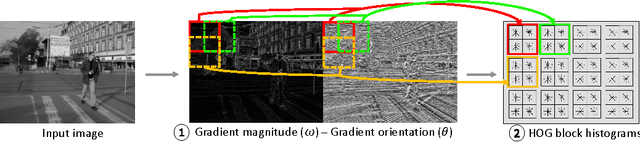
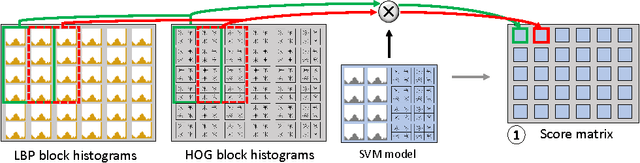
We propose a real-time pedestrian detection system for the embedded Nvidia Tegra X1 GPU-CPU hybrid platform. The pipeline is composed by the following state-of-the-art algorithms: Histogram of Local Binary Patterns (LBP) and Histograms of Oriented Gradients (HOG) features extracted from the input image; Pyramidal Sliding Window technique for candidate generation; and Support Vector Machine (SVM) for classification. Results show a 8x speedup in the target Tegra X1 platform and a better performance/watt ratio than desktop CUDA platforms in study.
* 10 pages
GPU-accelerated real-time stixel computation
Oct 13, 2016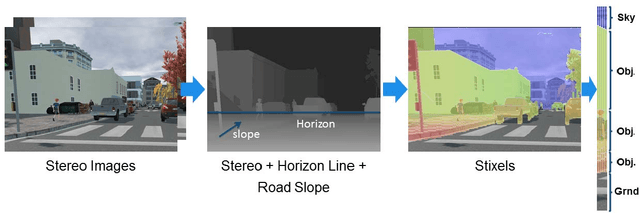

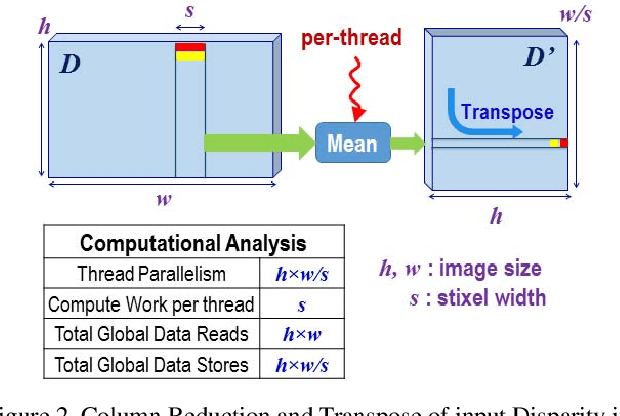
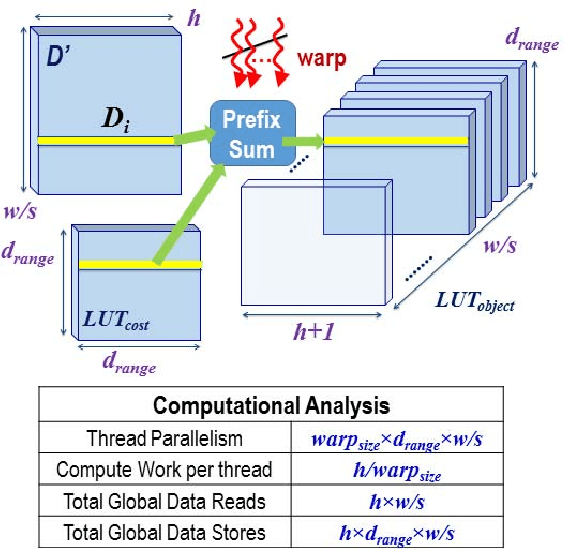
The Stixel World is a medium-level, compact representation of road scenes that abstracts millions of disparity pixels into hundreds or thousands of stixels. The goal of this work is to implement and evaluate a complete multi-stixel estimation pipeline on an embedded, energy-efficient, GPU-accelerated device. This work presents a full GPU-accelerated implementation of stixel estimation that produces reliable results at 26 frames per second (real-time) on the Tegra X1 for disparity images of 1024x440 pixels and stixel widths of 5 pixels, and achieves more than 400 frames per second on a high-end Titan X GPU card.
Embedded real-time stereo estimation via Semi-Global Matching on the GPU
Oct 13, 2016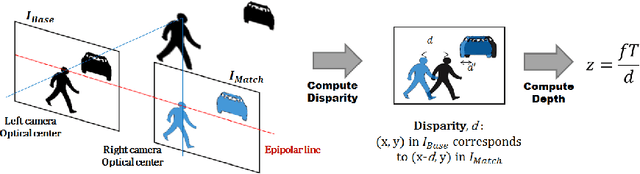
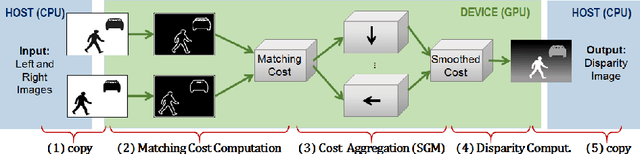
Dense, robust and real-time computation of depth information from stereo-camera systems is a computationally demanding requirement for robotics, advanced driver assistance systems (ADAS) and autonomous vehicles. Semi-Global Matching (SGM) is a widely used algorithm that propagates consistency constraints along several paths across the image. This work presents a real-time system producing reliable disparity estimation results on the new embedded energy-efficient GPU devices. Our design runs on a Tegra X1 at 42 frames per second (fps) for an image size of 640x480, 128 disparity levels, and using 4 path directions for the SGM method.