 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGPU-based Pedestrian Detection for Autonomous Driving
Nov 05, 2016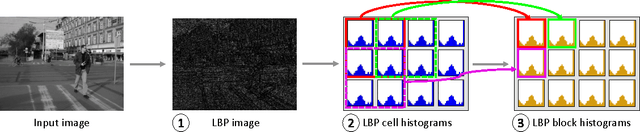
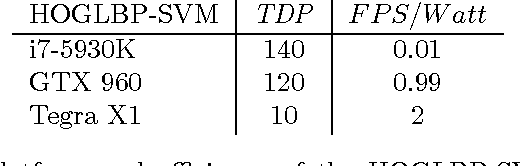
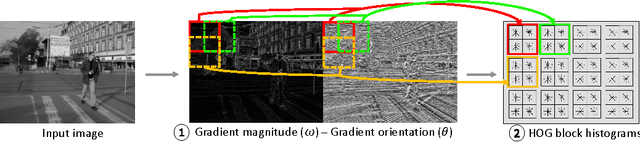
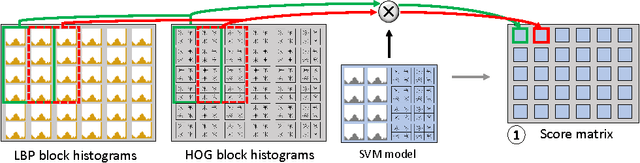
We propose a real-time pedestrian detection system for the embedded Nvidia Tegra X1 GPU-CPU hybrid platform. The pipeline is composed by the following state-of-the-art algorithms: Histogram of Local Binary Patterns (LBP) and Histograms of Oriented Gradients (HOG) features extracted from the input image; Pyramidal Sliding Window technique for candidate generation; and Support Vector Machine (SVM) for classification. Results show a 8x speedup in the target Tegra X1 platform and a better performance/watt ratio than desktop CUDA platforms in study.
* 10 pages
GPU-accelerated real-time stixel computation
Oct 13, 2016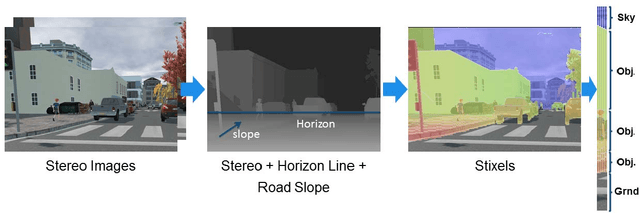

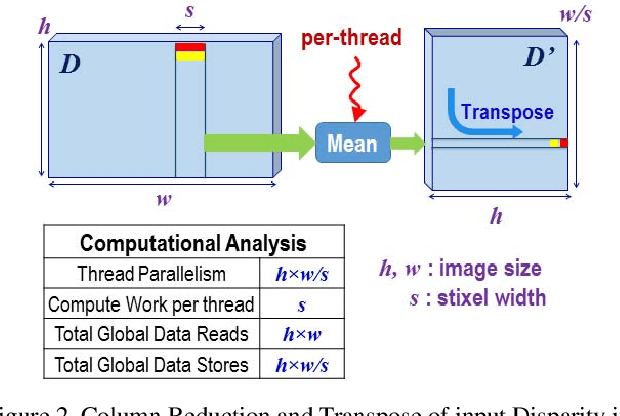
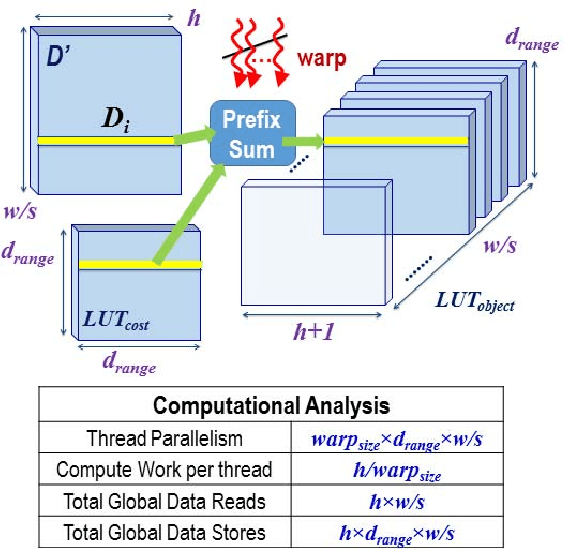
The Stixel World is a medium-level, compact representation of road scenes that abstracts millions of disparity pixels into hundreds or thousands of stixels. The goal of this work is to implement and evaluate a complete multi-stixel estimation pipeline on an embedded, energy-efficient, GPU-accelerated device. This work presents a full GPU-accelerated implementation of stixel estimation that produces reliable results at 26 frames per second (real-time) on the Tegra X1 for disparity images of 1024x440 pixels and stixel widths of 5 pixels, and achieves more than 400 frames per second on a high-end Titan X GPU card.
Embedded real-time stereo estimation via Semi-Global Matching on the GPU
Oct 13, 2016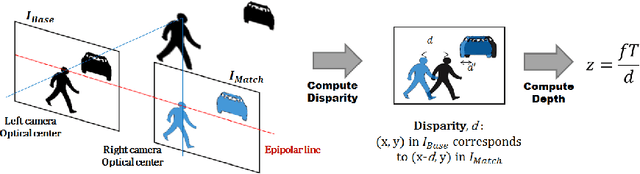
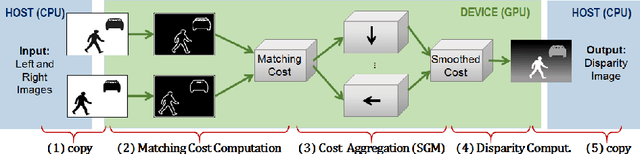
Dense, robust and real-time computation of depth information from stereo-camera systems is a computationally demanding requirement for robotics, advanced driver assistance systems (ADAS) and autonomous vehicles. Semi-Global Matching (SGM) is a widely used algorithm that propagates consistency constraints along several paths across the image. This work presents a real-time system producing reliable disparity estimation results on the new embedded energy-efficient GPU devices. Our design runs on a Tegra X1 at 42 frames per second (fps) for an image size of 640x480, 128 disparity levels, and using 4 path directions for the SGM method.