 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContext-Aware Synthesis of Optimization Pipelines for Warehouse Optimization
Jun 25, 2026Order fulfillment in manual picker-to-goods warehouses involves interconnected decisions such as item assignment, order batching, and picker routing. While integrated models capture interactions between these decisions, practical warehouse systems often require decomposed approaches due to organizational boundaries, differing responsibilities, or limited data availability. Existing studies primarily evaluate algorithms for isolated subproblems or fixed subproblem combinations for specific warehouse settings, but lack a general mechanism to determine applicable algorithm configurations, compose them into valid solution pipelines, and assess their performance. With Context-Aware Synthesis of Optimization Pipelines (CASOP), we propose a framework for constructing and evaluating context-specific optimization pipelines and apply these to order fulfillment. The framework comprises: (1) a modular repository of algorithms for common order fulfillment problems; (2) semantic data and algorithm cards to describe warehouse context and algorithm requirements; (3) a taxonomy that structures order fulfillment problems into relevant subproblems; (4) a pipeline synthesizer that identifies applicable algorithms for a given warehouse context and composes all valid optimization pipelines; and (5) a pipeline evaluator that assesses all resulting pipelines. We demonstrate the framework on 7 benchmark instance sets covering four problem classes, resulting in 1,063,044 valid pipelines. The framework supports researchers and practitioners in designing, automatically synthesizing, and selecting valid, high-performing algorithmic pipelines for warehouse operations. The software is open-source and available at https://github.com/kit-dsm/ware_ops_pipes and https://github.com/kit-dsm/ware_ops_algos. Keywords: Warehouse optimization, Algorithm selection, Pipeline synthesis, Order fulfillment
CoupleEvo: Evolving Heuristics for Coupled Optimization Problems Using Large Language Models
May 07, 2026Many real-world optimization problems consist of multiple tightly coupled subproblems whose solutions must be coordinated to achieve high overall performance. However, existing large language model driven automated heuristic design approaches are limited to single-problem settings. In this paper, we propose CoupleEvo. CoupleEvo proposes three evolutionary coordination strategies to evolve heuristics for coupled optimization problems: the sequential strategy evolves heuristics for one subproblem after the other; the iterative strategy alternates the evolution of heuristics for different subproblems over successive generations; and the integrated strategy evolves heuristics for all problems simultaneously. The approach is evaluated on two representative coupled optimization problems. Experimental results show that decomposition-based strategies (sequential and iterative) provide more stable convergence and higher solution quality, while the integrated evolution strategy suffers from increased search complexity and variability. These findings highlight the importance of coordinating evolutionary search across interdependent subproblems and demonstrate the potential of LLM-driven heuristic design for complex coupled optimization problems. The code is available: https://github.com/tb-git-kit-research/CoupleEvo.
The Multi-AMR Buffer Storage, Retrieval, and Reshuffling Problem: Exact and Heuristic Approaches
Mar 27, 2026Buffer zones are essential in production systems to decouple sequential processes. In dense floor storage environments, such as space-constrained brownfield facilities, manual operation is increasingly challenged by severe labor shortages and rising operational costs. Automating these zones requires solving the Buffer Storage, Retrieval, and Reshuffling Problem (BSRRP). While previous work has addressed scenarios where the focus is limited to reshuffling and retrieving a fixed set of items, real-world manufacturing necessitates an adaptive approach that also incorporates arriving unit loads. This paper introduces the Multi-AMR BSRRP, coordinating a robot fleet to manage concurrent reshuffling, alongside time-windowed storage and retrieval tasks, within a shared floor area. We formulate a Binary Integer Programming (IP) model to obtain exact solutions for benchmarking purposes. As the problem is NP-hard, rendering exact methods computationally intractable for industrial scales, we propose a hierarchical heuristic. This approach decomposes the problem into an A* search for task-level sequence planning of unit load placements, and a Constraint Programming (CP) approach for multi-robot coordination and scheduling. Experiments demonstrate orders-of-magnitude computation time reductions compared to the exact formulation. These results confirm the heuristic's viability as responsive control logic for high-density production environments.
Algorithmic Prompt-Augmentation for Efficient LLM-Based Heuristic Design for A* Search
Jan 27, 2026Heuristic functions are essential to the performance of tree search algorithms such as A*, where their accuracy and efficiency directly impact search outcomes. Traditionally, such heuristics are handcrafted, requiring significant expertise. Recent advances in large language models (LLMs) and evolutionary frameworks have opened the door to automating heuristic design. In this paper, we extend the Evolution of Heuristics (EoH) framework to investigate the automated generation of guiding heuristics for A* search. We introduce a novel domain-agnostic prompt augmentation strategy that includes the A* code into the prompt to leverage in-context learning, named Algorithmic - Contextual EoH (A-CEoH). To evaluate the effectiveness of A-CeoH, we study two problem domains: the Unit-Load Pre-Marshalling Problem (UPMP), a niche problem from warehouse logistics, and the classical sliding puzzle problem (SPP). Our computational experiments show that A-CEoH can significantly improve the quality of the generated heuristics and even outperform expert-designed heuristics.
From Mice to Trains: Amortized Bayesian Inference on Graph Data
Jan 05, 2026Graphs arise across diverse domains, from biology and chemistry to social and information networks, as well as in transportation and logistics. Inference on graph-structured data requires methods that are permutation-invariant, scalable across varying sizes and sparsities, and capable of capturing complex long-range dependencies, making posterior estimation on graph parameters particularly challenging. Amortized Bayesian Inference (ABI) is a simulation-based framework that employs generative neural networks to enable fast, likelihood-free posterior inference. We adapt ABI to graph data to address these challenges to perform inference on node-, edge-, and graph-level parameters. Our approach couples permutation-invariant graph encoders with flexible neural posterior estimators in a two-module pipeline: a summary network maps attributed graphs to fixed-length representations, and an inference network approximates the posterior over parameters. In this setting, several neural architectures can serve as the summary network. In this work we evaluate multiple architectures and assess their performance on controlled synthetic settings and two real-world domains - biology and logistics - in terms of recovery and calibration.
Reinforcement Learning for AMR Charging Decisions: The Impact of Reward and Action Space Design
May 16, 2025We propose a novel reinforcement learning (RL) design to optimize the charging strategy for autonomous mobile robots in large-scale block stacking warehouses. RL design involves a wide array of choices that can mostly only be evaluated through lengthy experimentation. Our study focuses on how different reward and action space configurations, ranging from flexible setups to more guided, domain-informed design configurations, affect the agent performance. Using heuristic charging strategies as a baseline, we demonstrate the superiority of flexible, RL-based approaches in terms of service times. Furthermore, our findings highlight a trade-off: While more open-ended designs are able to discover well-performing strategies on their own, they may require longer convergence times and are less stable, whereas guided configurations lead to a more stable learning process but display a more limited generalization potential. Our contributions are threefold. First, we extend SLAPStack, an open-source, RL-compatible simulation-framework to accommodate charging strategies. Second, we introduce a novel RL design for tackling the charging strategy problem. Finally, we introduce several novel adaptive baseline heuristics and reproducibly evaluate the design using a Proximal Policy Optimization agent and varying different design configurations, with a focus on reward.
Leveraging Large Language Models to Develop Heuristics for Emerging Optimization Problems
Mar 05, 2025Combinatorial optimization problems often rely on heuristic algorithms to generate efficient solutions. However, the manual design of heuristics is resource-intensive and constrained by the designer's expertise. Recent advances in artificial intelligence, particularly large language models (LLMs), have demonstrated the potential to automate heuristic generation through evolutionary frameworks. Recent works focus only on well-known combinatorial optimization problems like the traveling salesman problem and online bin packing problem when designing constructive heuristics. This study investigates whether LLMs can effectively generate heuristics for niche, not yet broadly researched optimization problems, using the unit-load pre-marshalling problem as an example case. We propose the Contextual Evolution of Heuristics (CEoH) framework, an extension of the Evolution of Heuristics (EoH) framework, which incorporates problem-specific descriptions to enhance in-context learning during heuristic generation. Through computational experiments, we evaluate CEoH and EoH and compare the results. Results indicate that CEoH enables smaller LLMs to generate high-quality heuristics more consistently and even outperform larger models. Larger models demonstrate robust performance with or without contextualized prompts. The generated heuristics exhibit scalability to diverse instance configurations.
Mission planning for emergency rapid mapping with drones
Mar 02, 2022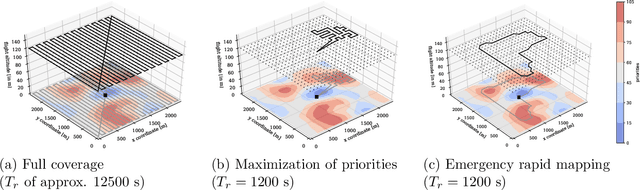
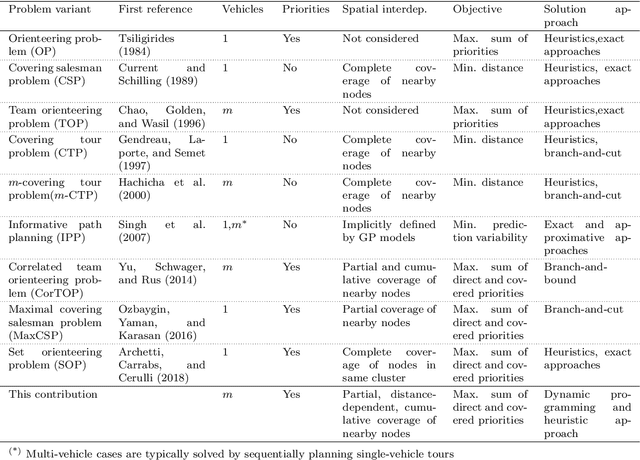
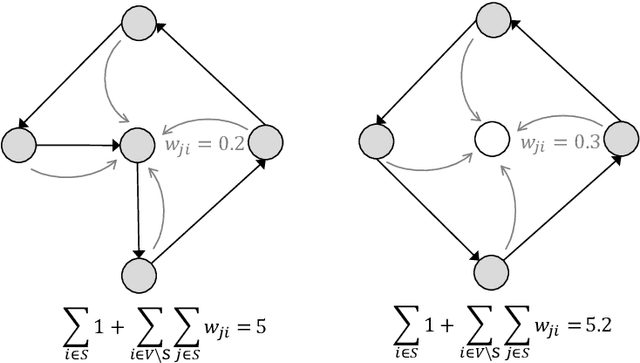
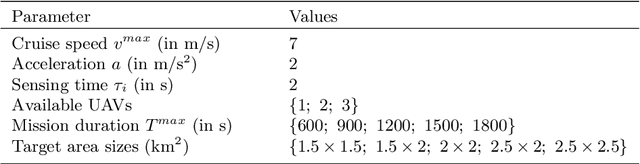
We introduce a mission planning concept for routing unmanned aerial vehicles (UAVs) through a set of sampling locations in the immediate aftermath of an incident such as a fire or chemical accident. Using interpolation methods that account for the spatial interdependencies inherent in the surveyed phenomenon, these samples allow predicting the distribution of hazardous substances across the affected area. We define the generalized correlated team orienteering problem (GCorTOP) for selecting {informative} samples considering spatial correlations between observed and unobserved locations as well as priorities in the surveyed area. To quickly provide high-quality solutions in time-sensitive situations, we propose a two-phase multi-start adaptive large neighborhood search (2MLS). We show the competitiveness of the solution approach using benchmark instances for the team orienteering problem and investigate the performance of the proposed models and solution approach in an extensive study based on newly introduced benchmark instances for the mission planning problem.
Towards Standardizing Reinforcement Learning Approaches for Stochastic Production Scheduling
Apr 16, 2021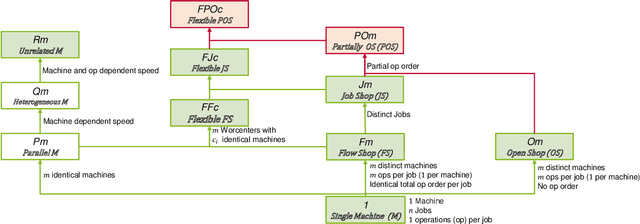
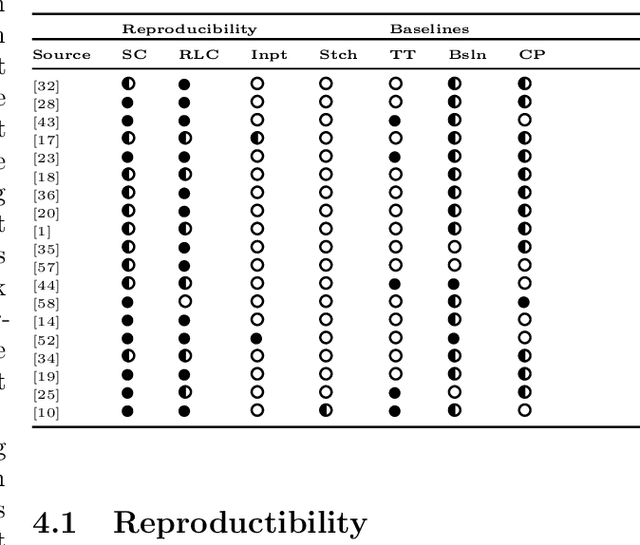
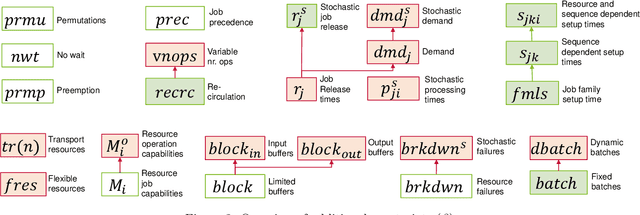
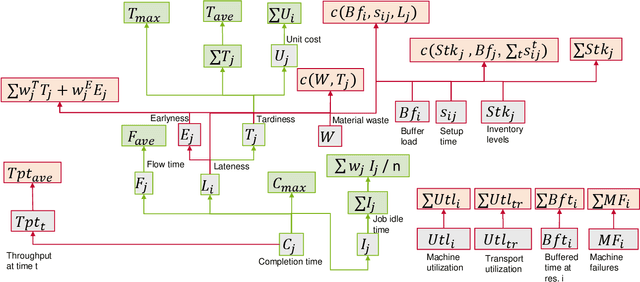
Recent years have seen a rise in interest in terms of using machine learning, particularly reinforcement learning (RL), for production scheduling problems of varying degrees of complexity. The general approach is to break down the scheduling problem into a Markov Decision Process (MDP), whereupon a simulation implementing the MDP is used to train an RL agent. Since existing studies rely on (sometimes) complex simulations for which the code is unavailable, the experiments presented are hard, or, in the case of stochastic environments, impossible to reproduce accurately. Furthermore, there is a vast array of RL designs to choose from. To make RL methods widely applicable in production scheduling and work out their strength for the industry, the standardization of model descriptions - both production setup and RL design - and validation scheme are a prerequisite. Our contribution is threefold: First, we standardize the description of production setups used in RL studies based on established nomenclature. Secondly, we classify RL design choices from existing publications. Lastly, we propose recommendations for a validation scheme focusing on reproducibility and sufficient benchmarking.
Travel Time Prediction using Tree-Based Ensembles
May 28, 2020
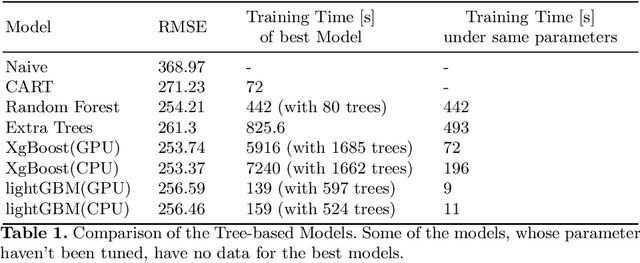
In this paper, we consider the task of predicting travel times between two arbitrary points in an urban scenario. We view this problem from two temporal perspectives: long-term forecasting with a horizon of several days and short-term forecasting with a horizon of one hour. Both of these perspectives are relevant for planning tasks in the context of urban mobility and transportation services. We utilize tree-based ensemble methods that we train and evaluate on a dataset of taxi trip records from New York City. Through extensive data analysis, we identify relevant temporal and spatial features. We also engineer additional features based on weather and routing data. The latter is obtained via a routing solver operating on the road network. The computational results show that the addition of this routing data can be beneficial to the model performance. Moreover, employing different models for short and long-term prediction is useful as short-term models are better suited to mirror current traffic conditions. In fact, we show that accurate short-term predictions may be obtained with only little training data.