 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTetraPackNet: Four-Corner-Based Object Detection in Logistics Use-Cases
Apr 19, 2021
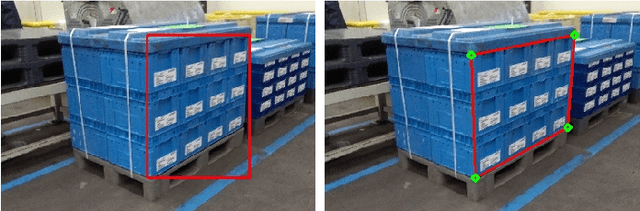

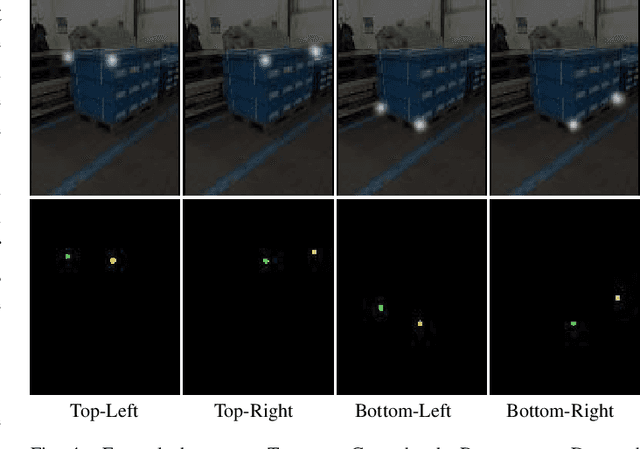
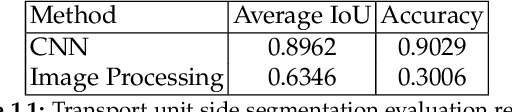
While common image object detection tasks focus on bounding boxes or segmentation masks as object representations, we propose a novel method, named TetraPackNet, using fourcorner based object representations. TetraPackNet is inspired by and based on CornerNet and uses similar base algorithms and ideas. It is designated for applications were the high-accuracy detection of regularly shaped objects is crucial, which is the case in the logistics use-case of packaging structure recognition. We evaluate our model on our specific real-world dataset for this use-case. Baselined against a previous solution, consisting of a a Mask R-CNN model and suitable post-processing steps, TetraPackNet achieves superior results (6% higher in accuracy) in the application of four-corner based transport unit side detection.
An Image Processing Pipeline for Automated Packaging Structure Recognition
Sep 29, 2020


Dispatching and receiving logistics goods, as well as transportation itself, involve a high amount of manual efforts. The transported goods, including their packaging and labeling, need to be double-checked, verified or recognized at many supply chain network points. These processes hold automation potentials, which we aim to exploit using computer vision techniques. More precisely, we propose a cognitive system for the fully automated recognition of packaging structures for standardized logistics shipments based on single RGB images. Our contribution contains descriptions of a suitable system design and its evaluation on relevant real-world data. Further, we discuss our algorithmic choices.
Fully-Automated Packaging Structure Recognition in Logistics Environments
Aug 11, 2020

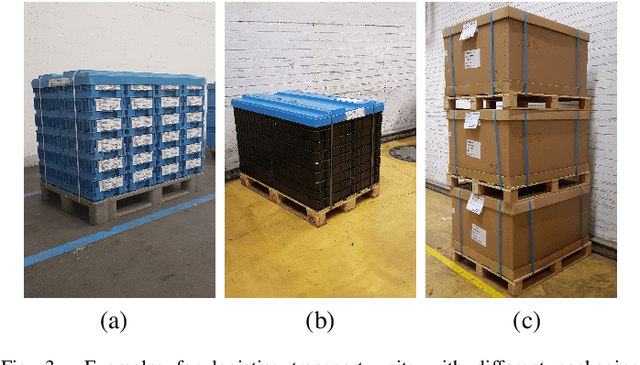
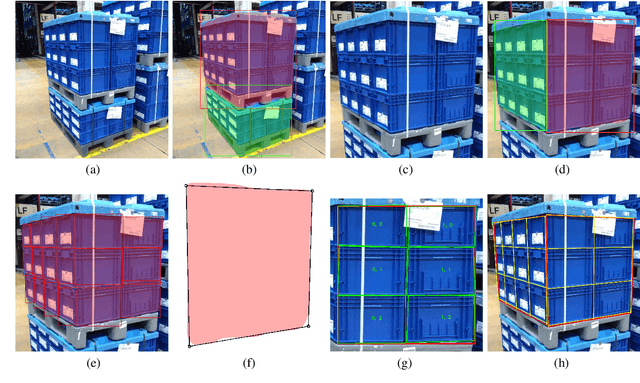
Within a logistics supply chain, a large variety of transported goods need to be handled, recognized and checked at many different network points. Often, huge manual effort is involved in recognizing or verifying packet identity or packaging structure, for instance to check the delivery for completeness. We propose a method for complete automation of packaging structure recognition: Based on a single image, one or multiple transport units are localized and, for each of these transport units, the characteristics, the total number and the arrangement of its packaging units is recognized. Our algorithm is based on deep learning models, more precisely convolutional neural networks for instance segmentation in images, as well as computer vision methods and heuristic components. We use a custom data set of realistic logistics images for training and evaluation of our method. We show that the solution is capable of correctly recognizing the packaging structure in approximately 85% of our test cases, and even more (91%) when focusing on most common package types.
Travel Time Prediction using Tree-Based Ensembles
May 28, 2020
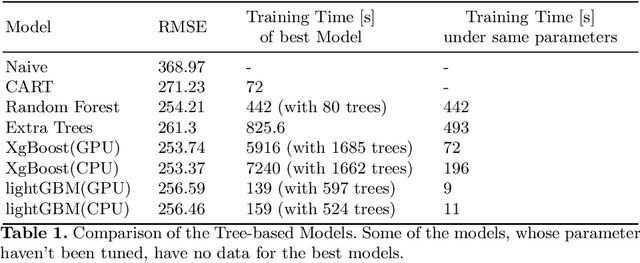
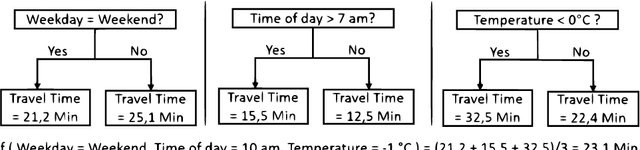
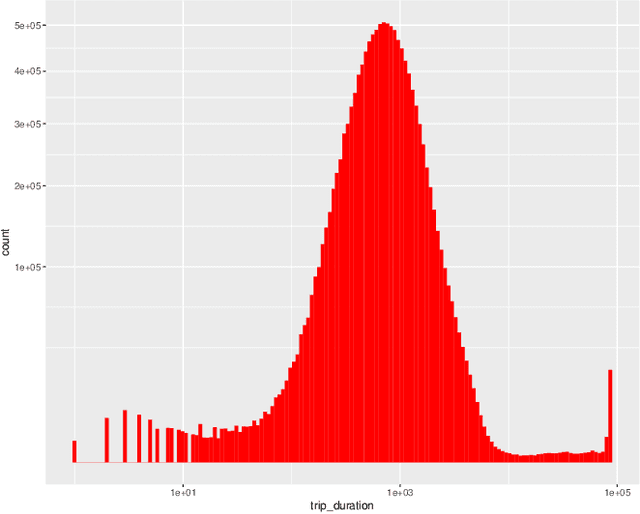
In this paper, we consider the task of predicting travel times between two arbitrary points in an urban scenario. We view this problem from two temporal perspectives: long-term forecasting with a horizon of several days and short-term forecasting with a horizon of one hour. Both of these perspectives are relevant for planning tasks in the context of urban mobility and transportation services. We utilize tree-based ensemble methods that we train and evaluate on a dataset of taxi trip records from New York City. Through extensive data analysis, we identify relevant temporal and spatial features. We also engineer additional features based on weather and routing data. The latter is obtained via a routing solver operating on the road network. The computational results show that the addition of this routing data can be beneficial to the model performance. Moreover, employing different models for short and long-term prediction is useful as short-term models are better suited to mirror current traffic conditions. In fact, we show that accurate short-term predictions may be obtained with only little training data.