 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAddressing Ambiguity in Imitation Learning through Product of Experts based Negative Feedback
Mar 27, 2026Programming robots to perform complex tasks is often difficult and time consuming, requiring expert knowledge and skills in robot software and sometimes hardware. Imitation learning is a method for training robots to perform tasks by leveraging human expertise through demonstrations. Typically, the assumption is that those demonstrations are performed by a single, highly competent expert. However, in many real-world applications that use user demonstrations for tasks or incorporate both user data and pretrained data, such as home robotics including assistive robots, this is unlikely to be the case. This paper presents research towards a system which can leverage suboptimal demonstrations to solve ambiguous tasks; and particularly learn from its own failures. This is a negative-feedback system which achieves significant improvement over purely positive imitation learning for ambiguous tasks, achieving a 90% improvement in success rate against a system that does not utilise negative feedback, compared to a 50% improvement in success rate when utilised on a real robot, as well as demonstrating higher efficacy, memory efficiency and time efficiency than a comparable negative feedback scheme. The novel scheme presented in this paper is validated through simulated and real-robot experiments.
TARMAC: A Taxonomy for Robot Manipulation in Chemistry
Oct 22, 2025Chemistry laboratory automation aims to increase throughput, reproducibility, and safety, yet many existing systems still depend on frequent human intervention. Advances in robotics have reduced this dependency, but without a structured representation of the required skills, autonomy remains limited to bespoke, task-specific solutions with little capacity to transfer beyond their initial design. Current experiment abstractions typically describe protocol-level steps without specifying the robotic actions needed to execute them. This highlights the lack of a systematic account of the manipulation skills required for robots in chemistry laboratories. To address this gap, we introduce TARMAC - a Taxonomy for Robot Manipulation in Chemistry - a domain-specific framework that defines and organizes the core manipulations needed in laboratory practice. Based on annotated teaching-lab demonstrations and supported by experimental validation, TARMAC categorizes actions according to their functional role and physical execution requirements. Beyond serving as a descriptive vocabulary, TARMAC can be instantiated as robot-executable primitives and composed into higher-level macros, enabling skill reuse and supporting scalable integration into long-horizon workflows. These contributions provide a structured foundation for more flexible and autonomous laboratory automation. More information is available at https://tarmac-paper.github.io/
Artificial Neural Microcircuits as Building Blocks: Concept and Challenges
Mar 24, 2024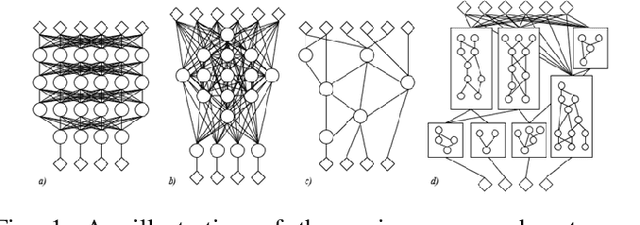
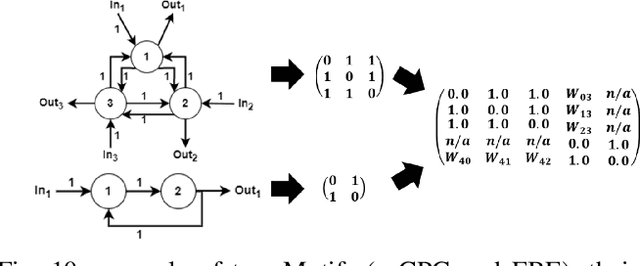
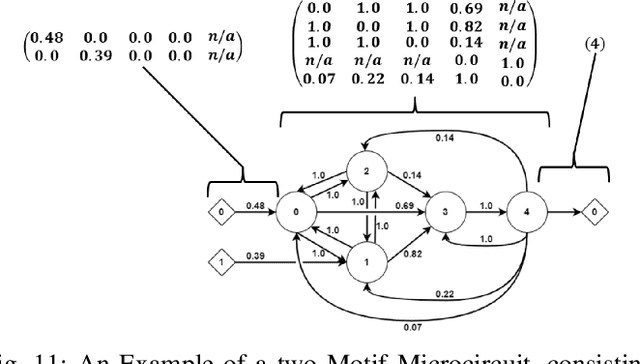
Artificial Neural Networks (ANNs) are one of the most widely employed forms of bio-inspired computation. However the current trend is for ANNs to be structurally homogeneous. Furthermore, this structural homogeneity requires the application of complex training and learning tools that produce application specific ANNs, susceptible to pitfalls such as overfitting. In this paper, an new approach is explored, inspired by the role played in biology by Neural Microcircuits, the so called ``fundamental processing elements'' of organic nervous systems. How large neural networks, particularly Spiking Neural Networks (SNNs) can be assembled using Artificial Neural Microcircuits (ANMs), intended as off-the-shelf components, is articulated; the results of initial work to produce a catalogue of such Microcircuits though the use of Novelty Search is shown; followed by efforts to expand upon this initial work, including a discussion of challenges uncovered during these efforts and explorations of methods by which they might be overcome.
Multi-objective Evolutionary Approach for Efficient Kernel Size and Shape for CNN
Jun 28, 2021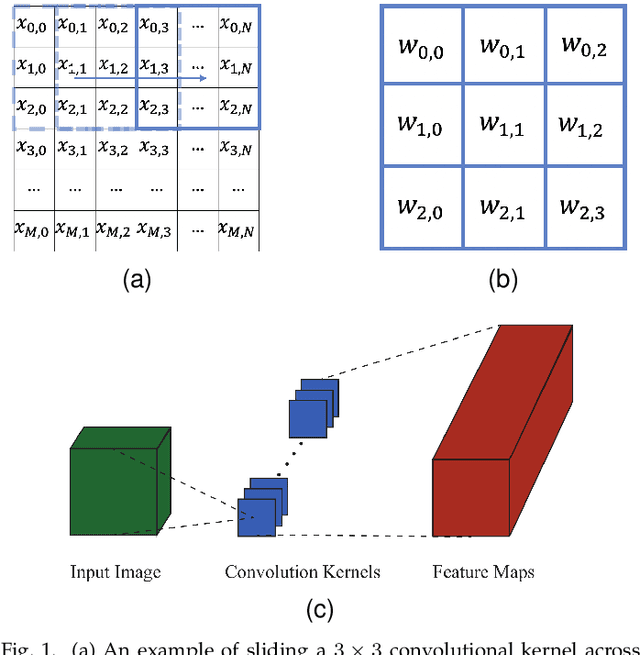
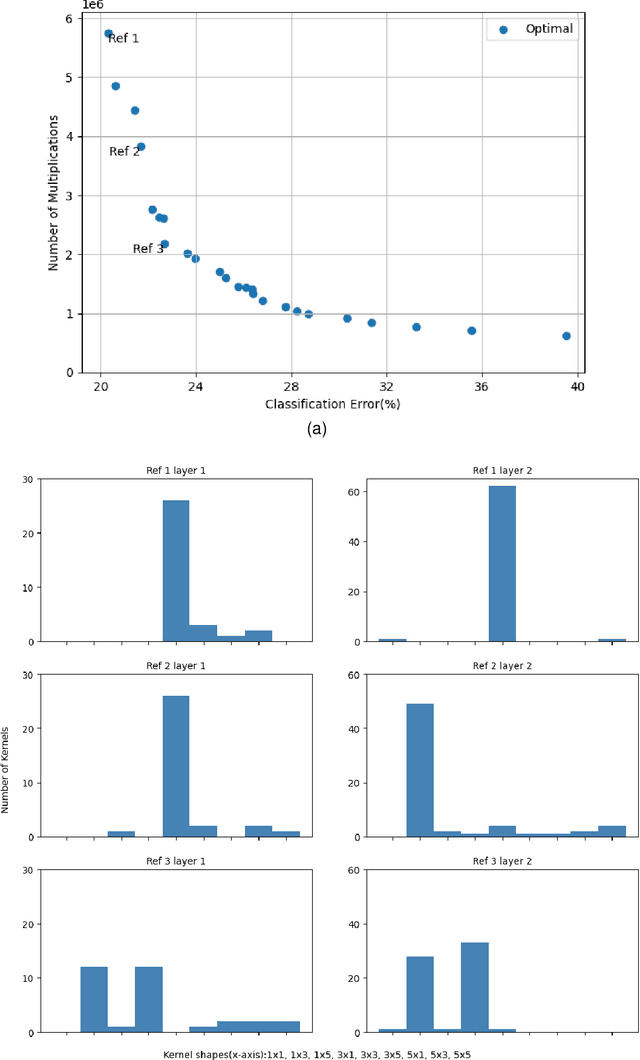
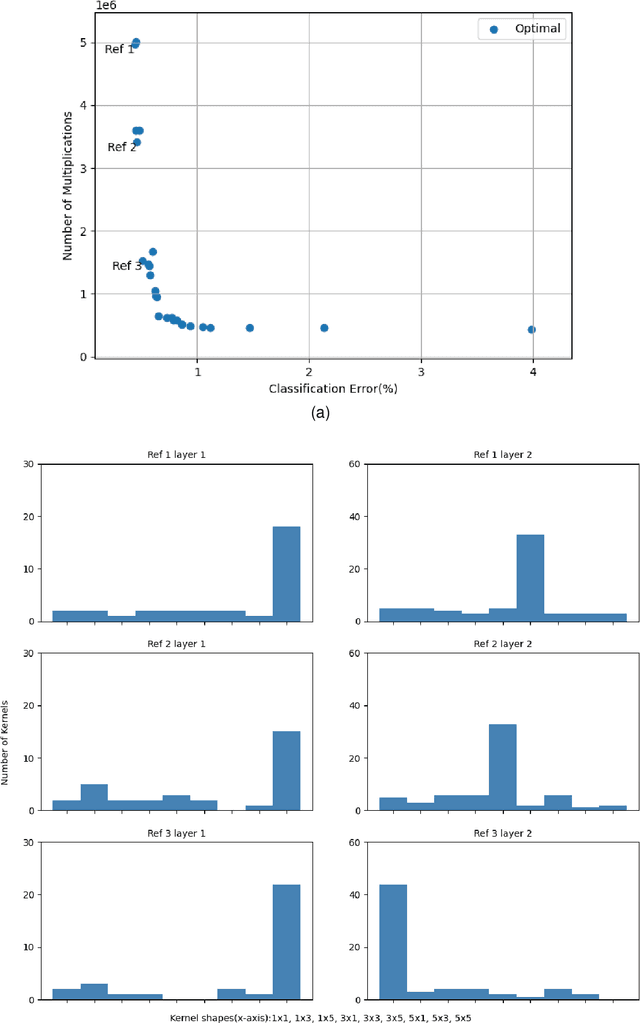

While state-of-the-art development in CNN topology, such as VGGNet and ResNet, have become increasingly accurate, these networks are computationally expensive involving billions of arithmetic operations and parameters. To improve the classification accuracy, state-of-the-art CNNs usually involve large and complex convolutional layers. However, for certain applications, e.g. Internet of Things (IoT), where such CNNs are to be implemented on resource-constrained platforms, the CNN architectures have to be small and efficient. To deal with this problem, reducing the resource consumption in convolutional layers has become one of the most significant solutions. In this work, a multi-objective optimisation approach is proposed to trade-off between the amount of computation and network accuracy by using Multi-Objective Evolutionary Algorithms (MOEAs). The number of convolution kernels and the size of these kernels are proportional to computational resource consumption of CNNs. Therefore, this paper considers optimising the computational resource consumption by reducing the size and number of kernels in convolutional layers. Additionally, the use of unconventional kernel shapes has been investigated and results show these clearly outperform the commonly used square convolution kernels. The main contributions of this paper are therefore a methodology to significantly reduce computational cost of CNNs, based on unconventional kernel shapes, and provide different trade-offs for specific use cases. The experimental results further demonstrate that the proposed method achieves large improvements in resource consumption with no significant reduction in network performance. Compared with the benchmark CNN, the best trade-off architecture shows a reduction in multiplications of up to 6X and with slight increase in classification accuracy on CIFAR-10 dataset.
Morpho-evolution with learning using a controller archive as an inheritance mechanism
Apr 09, 2021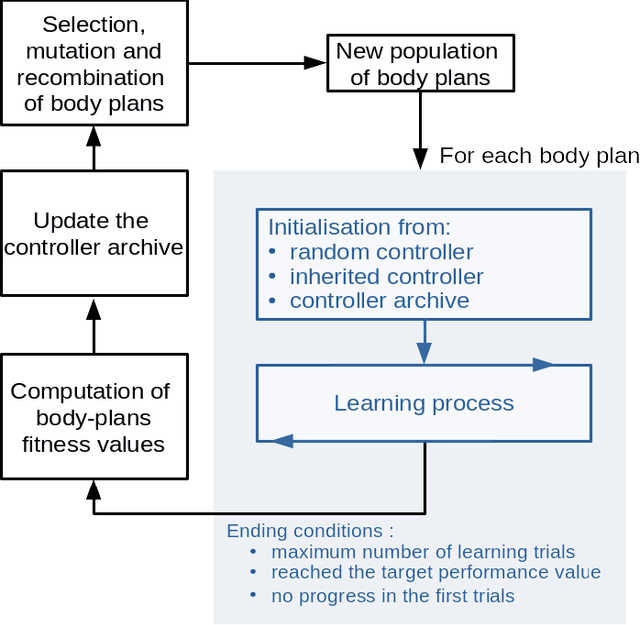
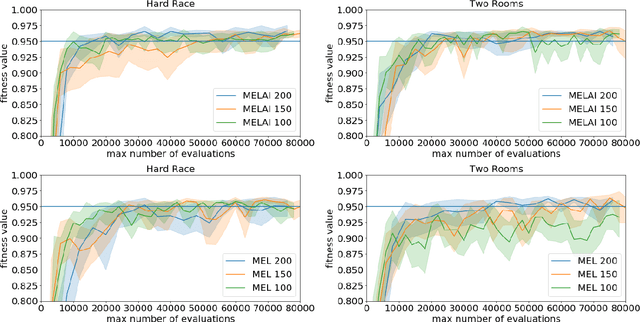
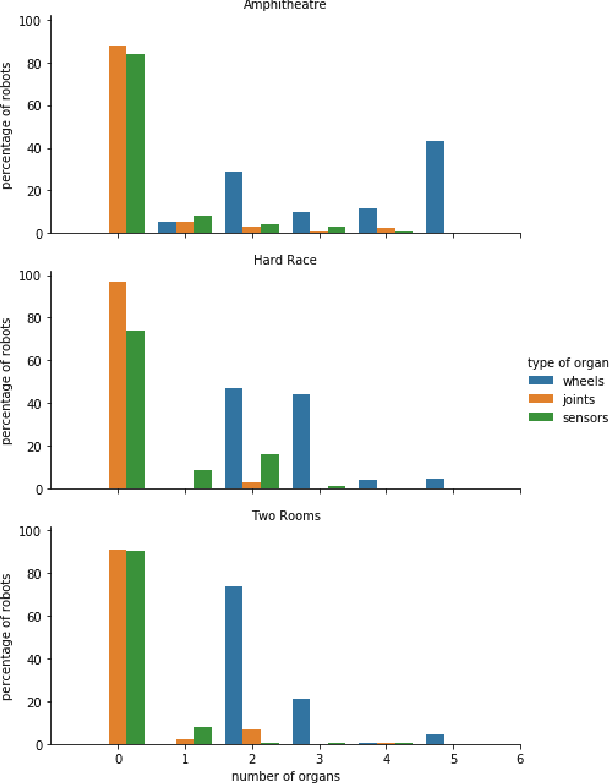
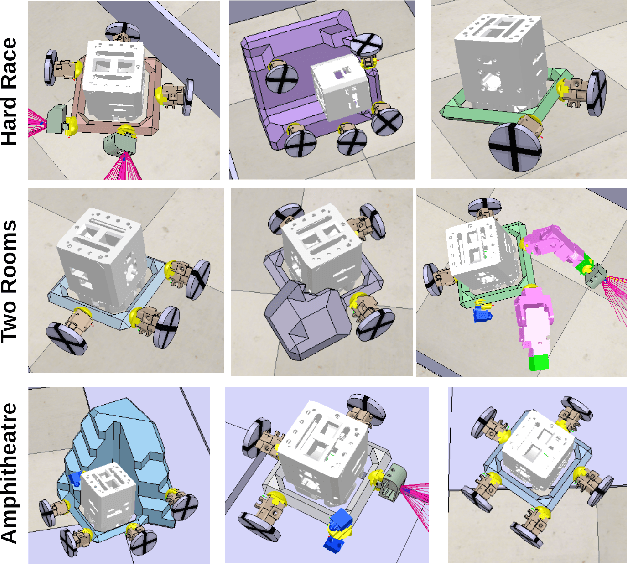
In evolutionary robotics, several approaches have been shown to be capable of the joint optimisation of body-plans and controllers by either using only evolution or combining evolution and learning. When working in rich morphological spaces, it is common for offspring to have body-plans that are very different from either of their parents, which can cause difficulties with respect to inheriting a suitable controller. To address this, we propose a framework that combines an evolutionary algorithm to generate body-plans and a learning algorithm to optimise the parameters of a neural controller where the topology of this controller is created once the body-plan of each offspring body-plan is generated. The key novelty of the approach is to add an external archive for storing learned controllers that map to explicit `types' of robots (where this is defined with respect the features of the body-plan). By inheriting an appropriate controller from the archive rather than learning from a randomly initialised one, we show that both the speed and magnitude of learning increases over time when compared to an approach that starts from scratch, using three different test-beds. The framework also provides new insights into the complex interactions between evolution and learning, and the role of morphological intelligence in robot design.