 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlaneSDF-based Change Detection for Long-term Dense Mapping
Jul 18, 2022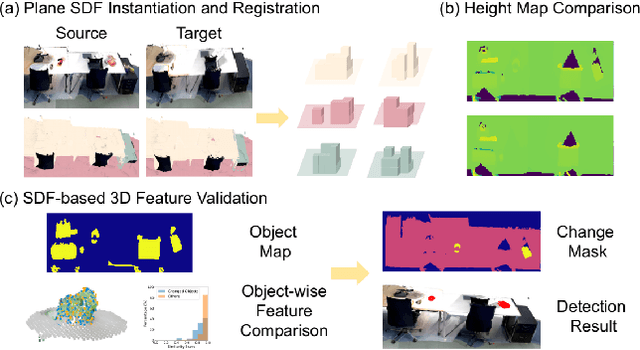
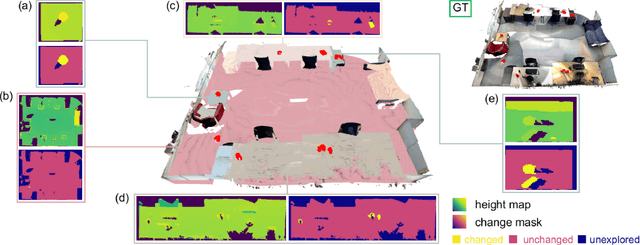
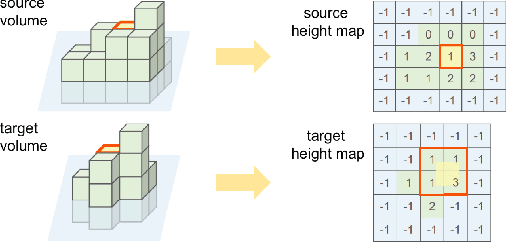
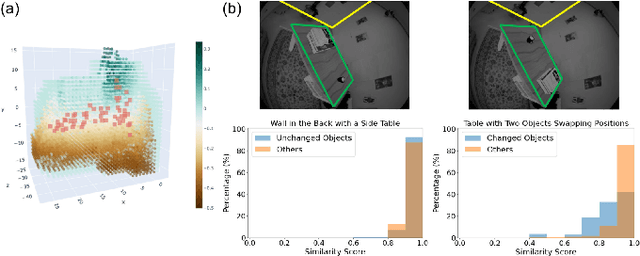
The ability to process environment maps across multiple sessions is critical for robots operating over extended periods of time. Specifically, it is desirable for autonomous agents to detect changes amongst maps of different sessions so as to gain a conflict-free understanding of the current environment. In this paper, we look into the problem of change detection based on a novel map representation, dubbed Plane Signed Distance Fields (PlaneSDF), where dense maps are represented as a collection of planes and their associated geometric components in SDF volumes. Given point clouds of the source and target scenes, we propose a three-step PlaneSDF-based change detection approach: (1) PlaneSDF volumes are instantiated within each scene and registered across scenes using plane poses; 2D height maps and object maps are extracted per volume via height projection and connected component analysis. (2) Height maps are compared and intersected with the object map to produce a 2D change location mask for changed object candidates in the source scene. (3) 3D geometric validation is performed using SDF-derived features per object candidate for change mask refinement. We evaluate our approach on both synthetic and real-world datasets and demonstrate its effectiveness via the task of changed object detection.
Hybrid scene Compression for Visual Localization
Jul 19, 2018

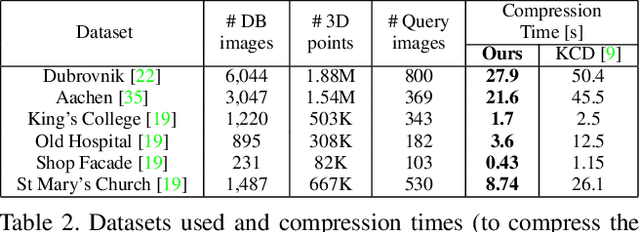

Localizing an image wrt. a large scale 3D scene represents a core task for many computer vision applications. The increasing size of available 3D scenes makes visual localization prohibitively slow for real-time applications due to the large amount of data that the system needs to analyze and store. Therefore, compression becomes a necessary step in order to manage large scenes. In this work, we introduce a new hybrid compression algorithm that selects two subsets of points from the original 3D model: a small set of points with full appearance information, and an additional, larger set of points with compressed information. Our algorithm takes into account both spatial coverage as well as appearance uniqueness during compression. Quantization techniques are exploited during compression time, reducing run-time wrt. previous compression methods. A RANSAC variant tailored to our specific compression output is also introduced. Experiments on six large-scale datasets show that our method performs better than previous compression techniques in terms of memory, run-time and accuracy. Furthermore, the localization rates and pose accuracy obtained are comparable to state-of-the-art feature-based methods, while using a small fraction of the memory.
Two forms of minimality in ASPIC+
Feb 02, 2017Many systems of structured argumentation explicitly require that the facts and rules that make up the argument for a conclusion be the minimal set required to derive the conclusion. ASPIC+ does not place such a requirement on arguments, instead requiring that every rule and fact that are part of an argument be used in its construction. Thus ASPIC+ arguments are minimal in the sense that removing any element of the argument would lead to a structure that is not an argument. In this brief note we discuss these two types of minimality and show how the first kind of minimality can, if desired, be recovered in ASPIC+.