 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTLIO: Tight Learned Inertial Odometry
Jul 10, 2020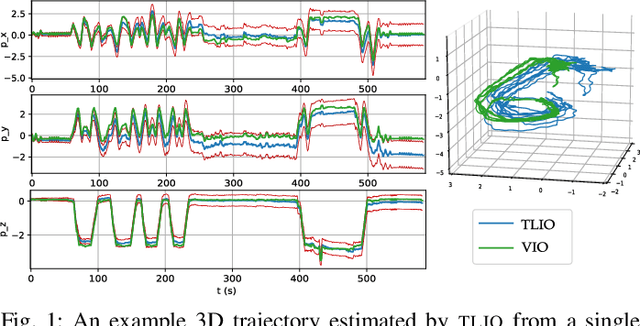
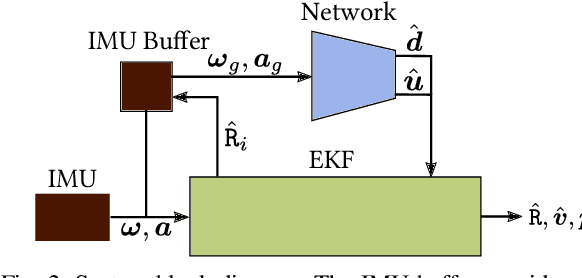
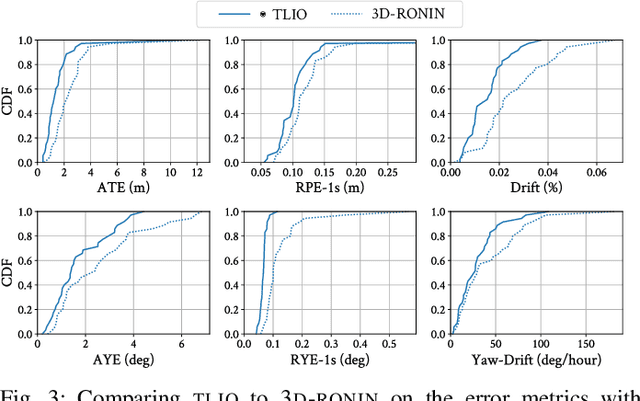
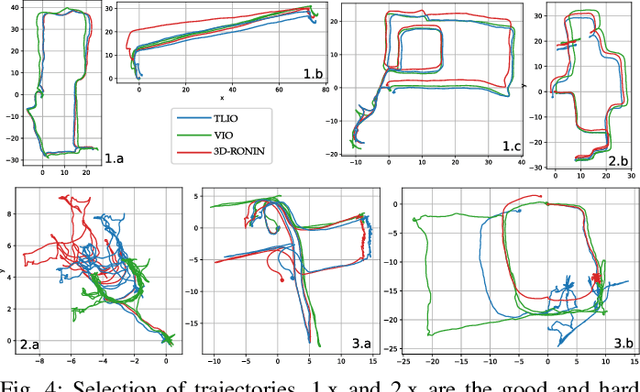
In this work we propose a tightly-coupled Extended Kalman Filter framework for IMU-only state estimation. Strap-down IMU measurements provide relative state estimates based on IMU kinematic motion model. However the integration of measurements is sensitive to sensor bias and noise, causing significant drift within seconds. Recent research by Yan et al. (RoNIN) and Chen et al. (IONet) showed the capability of using trained neural networks to obtain accurate 2D displacement estimates from segments of IMU data and obtained good position estimates from concatenating them. This paper demonstrates a network that regresses 3D displacement estimates and its uncertainty, giving us the ability to tightly fuse the relative state measurement into a stochastic cloning EKF to solve for pose, velocity and sensor biases. We show that our network, trained with pedestrian data from a headset, can produce statistically consistent measurement and uncertainty to be used as the update step in the filter, and the tightly-coupled system outperforms velocity integration approaches in position estimates, and AHRS attitude filter in orientation estimates.
Context-Aware Query Selection for Active Learning in Event Recognition
Apr 09, 2019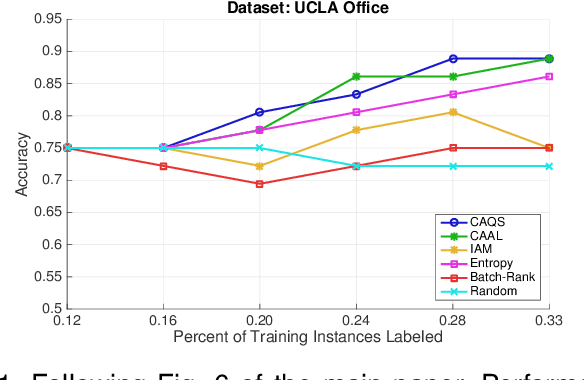
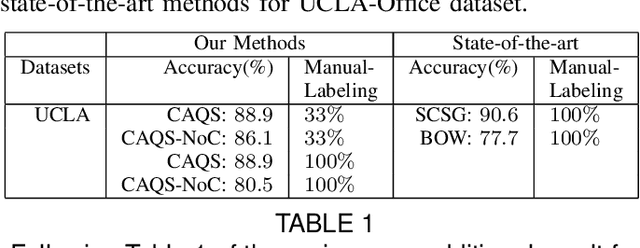
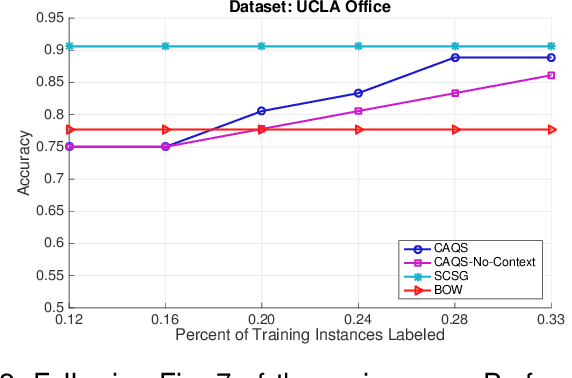
Activity recognition is a challenging problem with many practical applications. In addition to the visual features, recent approaches have benefited from the use of context, e.g., inter-relationships among the activities and objects. However, these approaches require data to be labeled, entirely available beforehand, and not designed to be updated continuously, which make them unsuitable for surveillance applications. In contrast, we propose a continuous-learning framework for context-aware activity recognition from unlabeled video, which has two distinct advantages over existing methods. First, it employs a novel active-learning technique that not only exploits the informativeness of the individual activities but also utilizes their contextual information during query selection; this leads to significant reduction in expensive manual annotation effort. Second, the learned models can be adapted online as more data is available. We formulate a conditional random field model that encodes the context and devise an information-theoretic approach that utilizes entropy and mutual information of the nodes to compute the set of most informative queries, which are labeled by a human. These labels are combined with graphical inference techniques for incremental updates. We provide a theoretical formulation of the active learning framework with an analytic solution. Experiments on six challenging datasets demonstrate that our framework achieves superior performance with significantly less manual labeling.