 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFinding Optimal Trading History in Reinforcement Learning for Stock Market Trading
Feb 19, 2025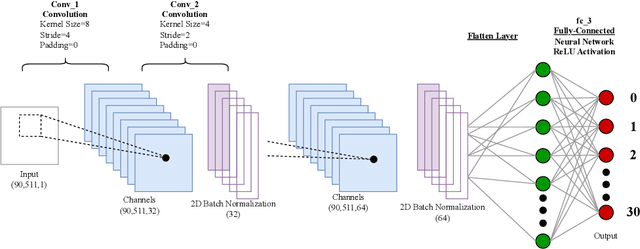
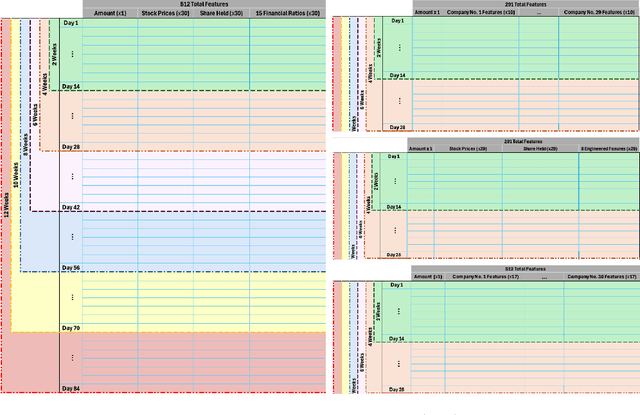
This paper investigates the optimization of temporal windows in Financial Deep Reinforcement Learning (DRL) models using 2D Convolutional Neural Networks (CNNs). We introduce a novel approach to treating the temporal field as a hyperparameter and examine its impact on model performance across various datasets and feature arrangements. We introduce a new hyperparameter for the CNN policy, proposing that this temporal field can and should be treated as a hyperparameter for these models. We examine the significance of this temporal field by iteratively expanding the window of observations presented to the CNN policy during the deep reinforcement learning process. Our iterative process involves progressively increasing the observation period from two weeks to twelve weeks, allowing us to examine the effects of different temporal windows on the model's performance. This window expansion is implemented in two settings. In one setting, we rearrange the features in the dataset to group them by company, allowing the model to have a full view of company data in its observation window and CNN kernel. In the second setting, we do not group the features by company, and features are arranged by category. Our study reveals that shorter temporal windows are most effective when no feature rearrangement to group per company is in effect. However, the model will utilize longer temporal windows and yield better performance once we introduce the feature rearrangement. To examine the consistency of our findings, we repeated our experiment on two datasets containing the same thirty companies from the Dow Jones Index but with different features in each dataset and consistently observed the above-mentioned patterns. The result is a trading model significantly outperforming global financial services firms such as the Global X Guru by the established Mirae Asset.
Gradient Reduction Convolutional Neural Network Policy for Financial Deep Reinforcement Learning
Aug 16, 2024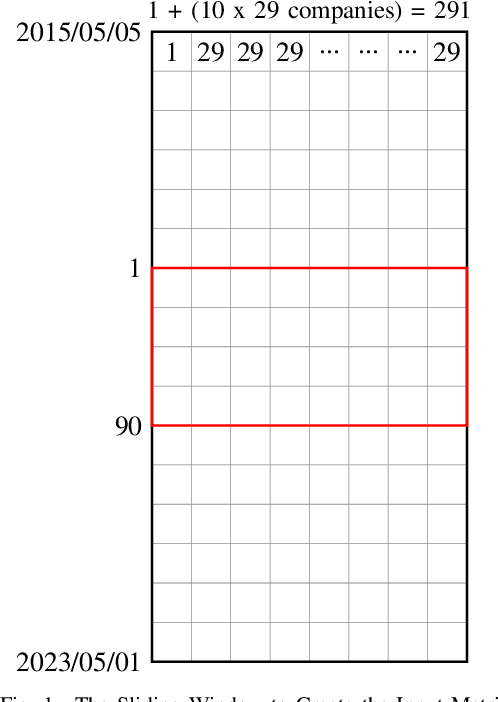
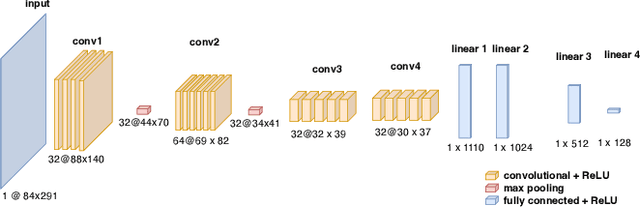
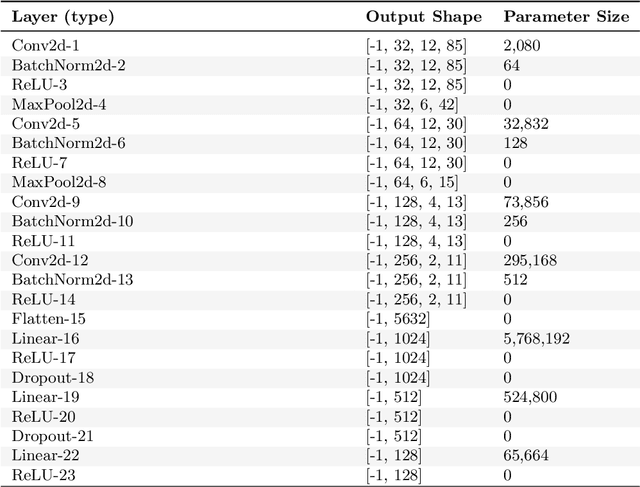
Building on our prior explorations of convolutional neural networks (CNNs) for financial data processing, this paper introduces two significant enhancements to refine our CNN model's predictive performance and robustness for financial tabular data. Firstly, we integrate a normalization layer at the input stage to ensure consistent feature scaling, addressing the issue of disparate feature magnitudes that can skew the learning process. This modification is hypothesized to aid in stabilizing the training dynamics and improving the model's generalization across diverse financial datasets. Secondly, we employ a Gradient Reduction Architecture, where earlier layers are wider and subsequent layers are progressively narrower. This enhancement is designed to enable the model to capture more complex and subtle patterns within the data, a crucial factor in accurately predicting financial outcomes. These advancements directly respond to the limitations identified in previous studies, where simpler models struggled with the complexity and variability inherent in financial applications. Initial tests confirm that these changes improve accuracy and model stability, suggesting that deeper and more nuanced network architectures can significantly benefit financial predictive tasks. This paper details the implementation of these enhancements and evaluates their impact on the model's performance in a controlled experimental setting.
Analyzing Gender Polarity in Short Social Media Texts with BERT: The Role of Emojis and Emoticons
Jun 13, 2024



In this effort we fine tuned different models based on BERT to detect the gender polarity of twitter accounts. We specially focused on analyzing the effect of using emojis and emoticons in performance of our model in classifying task. We were able to demonstrate that the use of these none word inputs alongside the mention of other accounts in a short text format like tweet has an impact in detecting the account holder's gender.
Real-time Motion Planning for autonomous vehicles in dynamic environments
Jun 05, 2024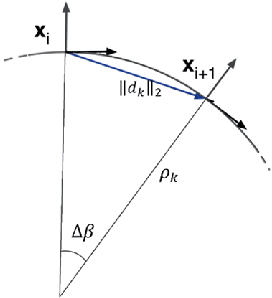
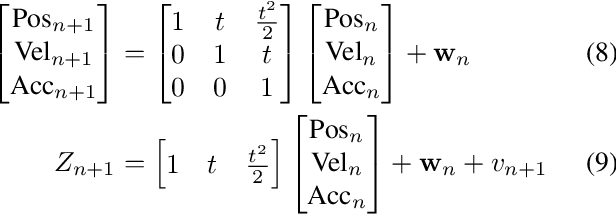
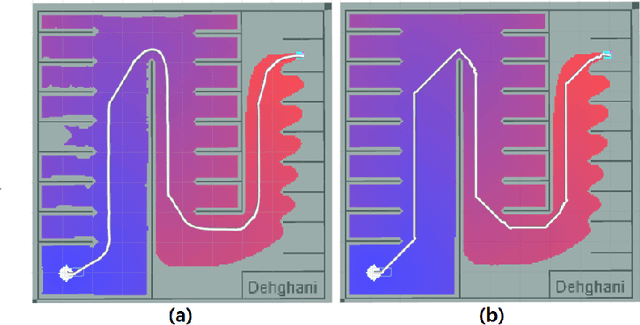
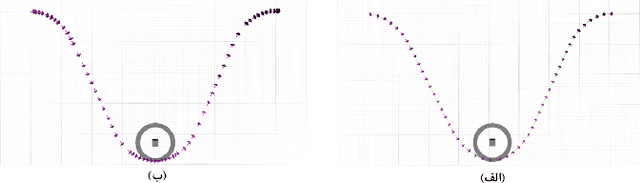
Recent advancements in self-driving car technologies have enabled them to navigate autonomously through various environments. However, one of the critical challenges in autonomous vehicle operation is trajectory planning, especially in dynamic environments with moving obstacles. This research aims to tackle this challenge by proposing a robust algorithm tailored for autonomous cars operating in dynamic environments with moving obstacles. The algorithm introduces two main innovations. Firstly, it defines path density by adjusting the number of waypoints along the trajectory, optimizing their distribution for accuracy in curved areas and reducing computational complexity in straight sections. Secondly, it integrates hierarchical motion planning algorithms, combining global planning with an enhanced $A^*$ graph-based method and local planning using the time elastic band algorithm with moving obstacle detection considering different motion models. The proposed algorithm is adaptable for different vehicle types and mobile robots, making it versatile for real-world applications. Simulation results demonstrate its effectiveness across various conditions, promising safer and more efficient navigation for autonomous vehicles in dynamic environments. These modifications significantly improve trajectory planning capabilities, addressing a crucial aspect of autonomous vehicle technology.
CNN-DRL for Scalable Actions in Finance
Jan 10, 2024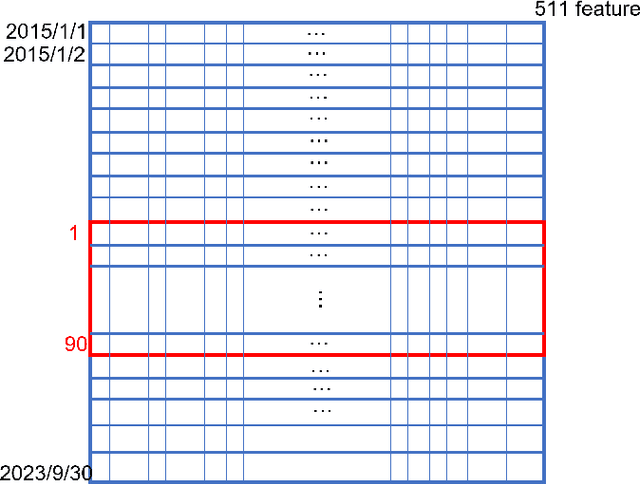
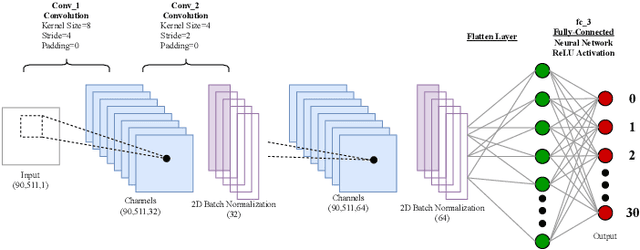
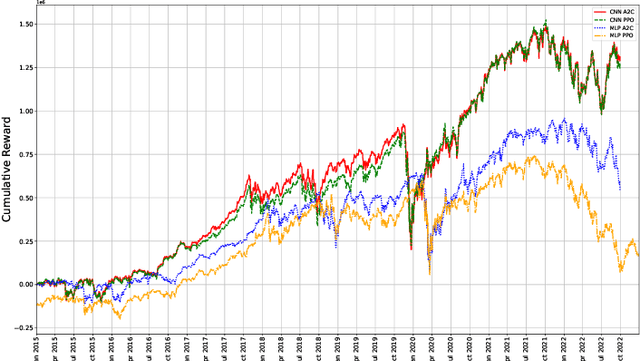
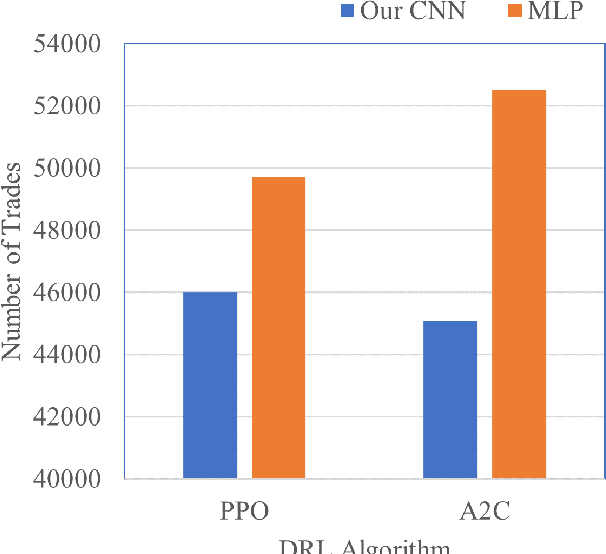
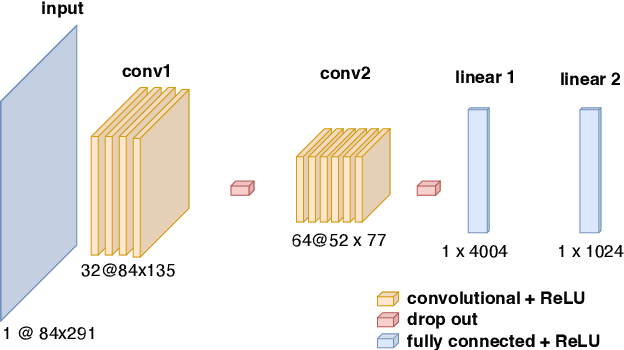
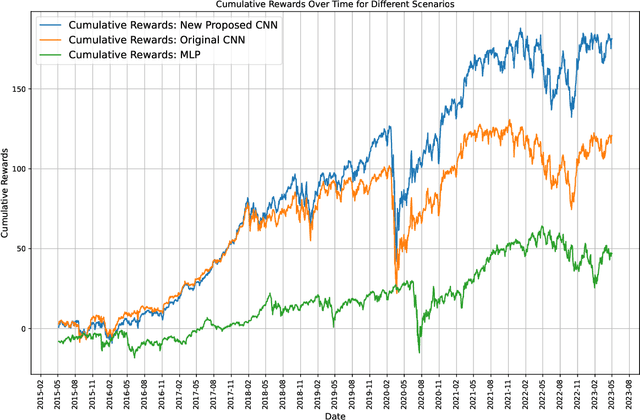
The published MLP-based DRL in finance has difficulties in learning the dynamics of the environment when the action scale increases. If the buying and selling increase to one thousand shares, the MLP agent will not be able to effectively adapt to the environment. To address this, we designed a CNN agent that concatenates the data from the last ninety days of the daily feature vector to create the CNN input matrix. Our extensive experiments demonstrate that the MLP-based agent experiences a loss corresponding to the initial environment setup, while our designed CNN remains stable, effectively learns the environment, and leads to an increase in rewards.
Placement of UAV-Mounted Mobile Base Station through User Load-Feature K-means Clustering
Oct 03, 2020

Temporary high traffic requests in cellular networks is a challenging problem to address. Recent advances in Unmanned Aerial Vehicles applied to cover these types of traffics. UAV -Mounted Mobile Base Stations placement is a challenging problem to achieve high performance. Different approaches have been proposed; however, user required traffic is not considered in UAV placement. We propose a new feature to apply to K-means clustering to find the optimum clusters. User required traffic is defined as a new feature to assign users to the UAVs. Our simulation results show that UAVs could be placed closer to the high traffic users to achieve higher performance.