 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeF3DGS: Federated 3D Gaussian Splatting for Decentralized Multi-Agent World Modeling
Apr 02, 2026We present F3DGS, a federated 3D Gaussian Splatting framework for decentralized multi-agent 3D reconstruction. Existing 3DGS pipelines assume centralized access to all observations, which limits their applicability in distributed robotic settings where agents operate independently, and centralized data aggregation may be restricted. Directly extending centralized training to multi-agent systems introduces communication overhead and geometric inconsistency. F3DGS first constructs a shared geometric scaffold by registering locally merged LiDAR point clouds from multiple clients to initialize a global 3DGS model. During federated optimization, Gaussian positions are fixed to preserve geometric alignment, while each client updates only appearance-related attributes, including covariance, opacity, and spherical harmonic coefficients. The server aggregates these updates using visibility-aware aggregation, weighting each client's contribution by how frequently it observed each Gaussian, resolving the partial-observability challenge inherent to multi-agent exploration. To evaluate decentralized reconstruction, we collect a multi-sequence indoor dataset with synchronized LiDAR, RGB, and IMU measurements. Experiments show that F3DGS achieves reconstruction quality comparable to centralized training while enabling distributed optimization across agents. The dataset, development kit, and source code will be publicly released.
Attention-based U-Net Method for Autonomous Lane Detection
Nov 16, 2024

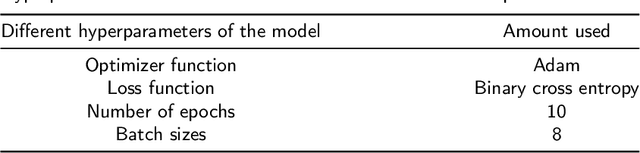

Lane detection involves identifying lanes on the road and accurately determining their location and shape. This is a crucial technique for modern assisted and autonomous driving systems. However, several unique properties of lanes pose challenges for detection methods. The lack of distinctive features can cause lane detection algorithms to be confused by other objects with similar appearances. Additionally, the varying number of lanes and the diversity in lane line patterns, such as solid, broken, single, double, merging, and splitting lines, further complicate the task. To address these challenges, Deep Learning (DL) approaches can be employed in various ways. Merging DL models with an attention mechanism has recently surfaced as a new approach. In this context, two deep learning-based lane recognition methods are proposed in this study. The first method employs the Feature Pyramid Network (FPN) model, delivering an impressive 87.59% accuracy in detecting road lanes. The second method, which incorporates attention layers into the U-Net model, significantly boosts the performance of semantic segmentation tasks. The advanced model, achieving an extraordinary 98.98% accuracy and far surpassing the basic U-Net model, clearly showcases its superiority over existing methods in a comparative analysis. The groundbreaking findings of this research pave the way for the development of more effective and reliable road lane detection methods, significantly advancing the capabilities of modern assisted and autonomous driving systems.
A Survey on Reinforcement Learning Applications in SLAM
Aug 26, 2024The emergence of mobile robotics, particularly in the automotive industry, introduces a promising era of enriched user experiences and adept handling of complex navigation challenges. The realization of these advancements necessitates a focused technological effort and the successful execution of numerous intricate tasks, particularly in the critical domain of Simultaneous Localization and Mapping (SLAM). Various artificial intelligence (AI) methodologies, such as deep learning and reinforcement learning, present viable solutions to address the challenges in SLAM. This study specifically explores the application of reinforcement learning in the context of SLAM. By enabling the agent (the robot) to iteratively interact with and receive feedback from its environment, reinforcement learning facilitates the acquisition of navigation and mapping skills, thereby enhancing the robot's decision-making capabilities. This approach offers several advantages, including improved navigation proficiency, increased resilience, reduced dependence on sensor precision, and refinement of the decision-making process. The findings of this study, which provide an overview of reinforcement learning's utilization in SLAM, reveal significant advancements in the field. The investigation also highlights the evolution and innovative integration of these techniques.
Real-time Motion Planning for autonomous vehicles in dynamic environments
Jun 05, 2024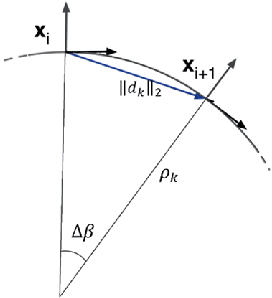
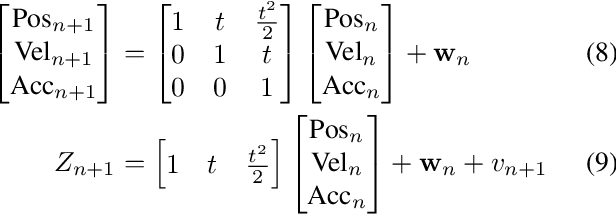
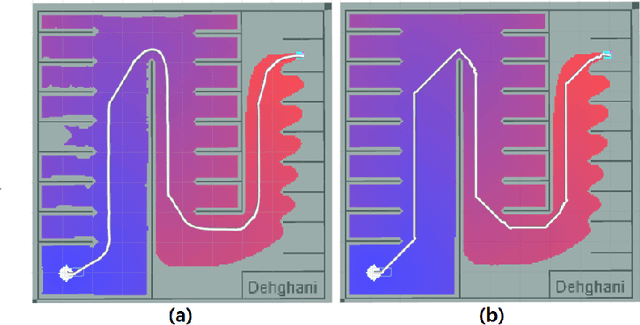
Recent advancements in self-driving car technologies have enabled them to navigate autonomously through various environments. However, one of the critical challenges in autonomous vehicle operation is trajectory planning, especially in dynamic environments with moving obstacles. This research aims to tackle this challenge by proposing a robust algorithm tailored for autonomous cars operating in dynamic environments with moving obstacles. The algorithm introduces two main innovations. Firstly, it defines path density by adjusting the number of waypoints along the trajectory, optimizing their distribution for accuracy in curved areas and reducing computational complexity in straight sections. Secondly, it integrates hierarchical motion planning algorithms, combining global planning with an enhanced $A^*$ graph-based method and local planning using the time elastic band algorithm with moving obstacle detection considering different motion models. The proposed algorithm is adaptable for different vehicle types and mobile robots, making it versatile for real-world applications. Simulation results demonstrate its effectiveness across various conditions, promising safer and more efficient navigation for autonomous vehicles in dynamic environments. These modifications significantly improve trajectory planning capabilities, addressing a crucial aspect of autonomous vehicle technology.