 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCan Transfer Entropy Infer Causality in Neuronal Circuits for Cognitive Processing?
Jan 22, 2019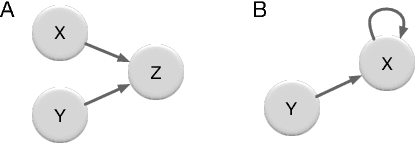
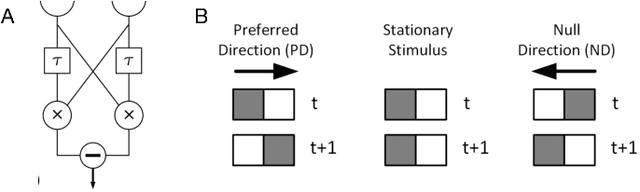
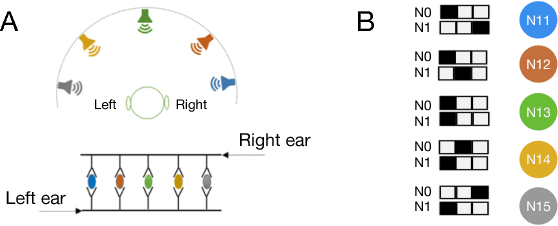
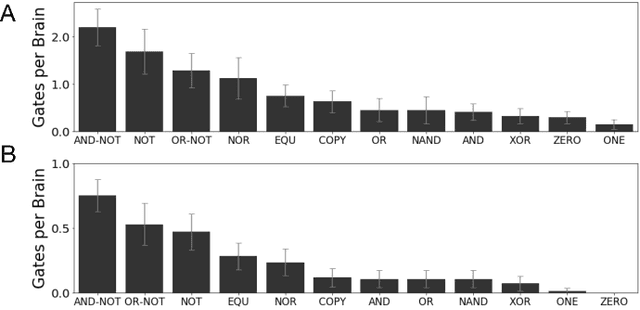
Finding the causes to observed effects and establishing causal relationships between events is (and has been) an essential element of science and philosophy. Automated methods that can detect causal relationships would be very welcome, but practical methods that can infer causality are difficult to find, and the subject of ongoing research. While Shannon information only detects correlation, there are several information-theoretic notions of "directed information" that have successfully detected causality in some systems, in particular in the neuroscience community. However, recent work has shown that some directed information measures can sometimes inadequately estimate the extent of causal relations, or even fail to identify existing cause-effect relations between components of systems, especially if neurons contribute in a cryptographic manner to influence the effector neuron. Here, we test how often cryptographic logic emerges in an evolutionary process that generates artificial neural circuits for two fundamental cognitive tasks: motion detection and sound localization. Our results suggest that whether or not transfer entropy measures of causality are misleading depends strongly on the cognitive task considered. These results emphasize the importance of understanding the fundamental logic processes that contribute to cognitive processing, and quantifying their relevance in any given nervous system.
Evolution leads to a diversity of motion-detection neuronal circuits
Jun 05, 2018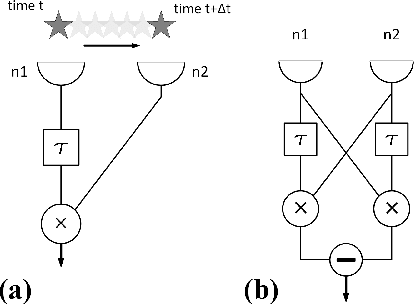

A central goal of evolutionary biology is to explain the origins and distribution of diversity across life. Beyond species or genetic diversity, we also observe diversity in the circuits (genetic or otherwise) underlying complex functional traits. However, while the theory behind the origins and maintenance of genetic and species diversity has been studied for decades, theory concerning the origin of diverse functional circuits is still in its infancy. It is not known how many different circuit structures can implement any given function, which evolutionary factors lead to different circuits, and whether the evolution of a particular circuit was due to adaptive or non-adaptive processes. Here, we use digital experimental evolution to study the diversity of neural circuits that encode motion detection in digital (artificial) brains. We find that evolution leads to an enormous diversity of potential neural architectures encoding motion detection circuits, even for circuits encoding the exact same function. Evolved circuits vary in both redundancy and complexity (as previously found in genetic circuits) suggesting that similar evolutionary principles underlie circuit formation using any substrate. We also show that a simple (designed) motion detection circuit that is optimally-adapted gains in complexity when evolved further, and that selection for mutational robustness led this gain in complexity.
Markov Brains: A Technical Introduction
Sep 17, 2017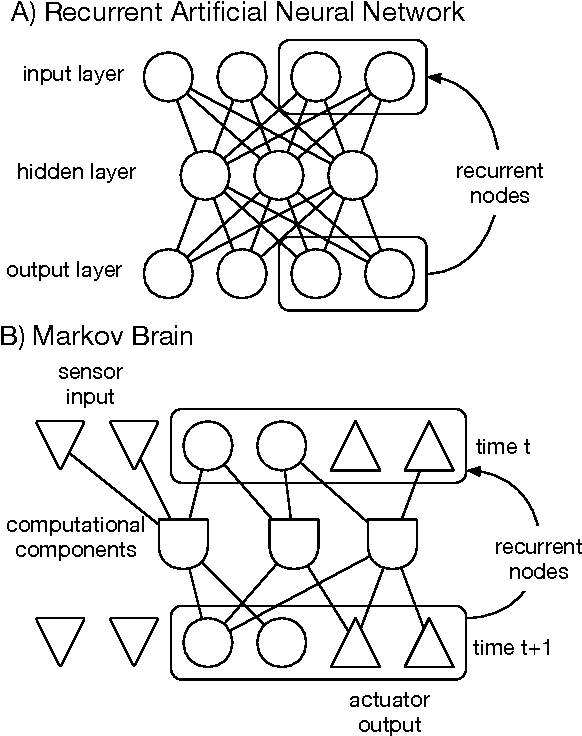

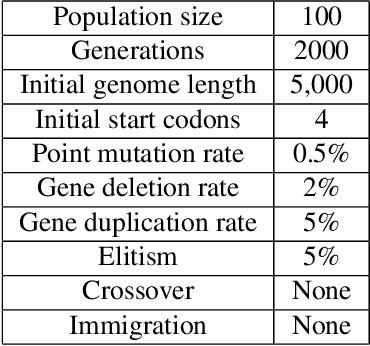
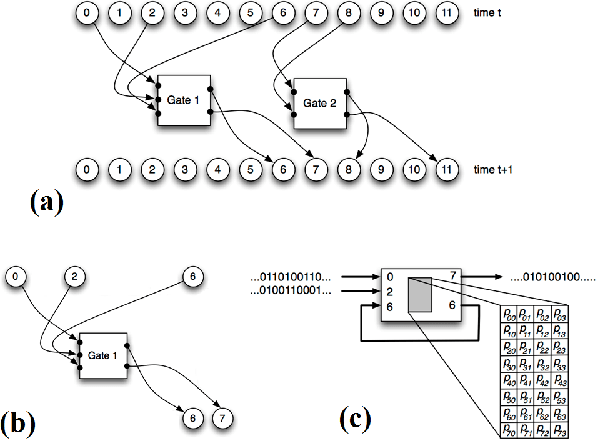
Markov Brains are a class of evolvable artificial neural networks (ANN). They differ from conventional ANNs in many aspects, but the key difference is that instead of a layered architecture, with each node performing the same function, Markov Brains are networks built from individual computational components. These computational components interact with each other, receive inputs from sensors, and control motor outputs. The function of the computational components, their connections to each other, as well as connections to sensors and motors are all subject to evolutionary optimization. Here we describe in detail how a Markov Brain works, what techniques can be used to study them, and how they can be evolved.
Flies as Ship Captains? Digital Evolution Unravels Selective Pressures to Avoid Collision in Drosophila
Mar 02, 2016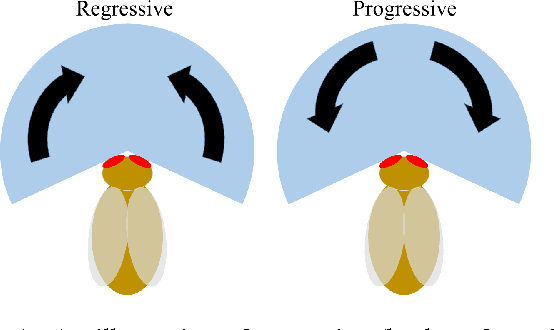
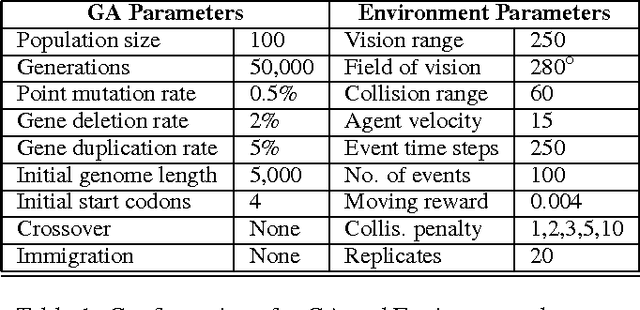


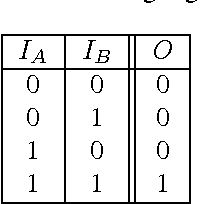
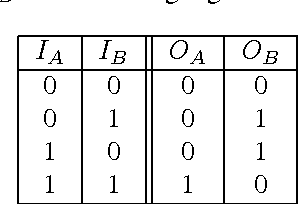
Flies that walk in a covered planar arena on straight paths avoid colliding with each other, but which of the two flies stops is not random. High-throughput video observations, coupled with dedicated experiments with controlled robot flies have revealed that flies utilize the type of optic flow on their retina as a determinant of who should stop, a strategy also used by ship captains to determine which of two ships on a collision course should throw engines in reverse. We use digital evolution to test whether this strategy evolves when collision avoidance is the sole penalty. We find that the strategy does indeed evolve in a narrow range of cost/benefit ratios, for experiments in which the "regressive motion" cue is error free. We speculate that these stringent conditions may not be sufficient to evolve the strategy in real flies, pointing perhaps to auxiliary costs and benefits not modeled in our study
* 8 pages, 10 figures, submitted to 15th Artificial Life conference (ALife 2016)