 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlies as Ship Captains? Digital Evolution Unravels Selective Pressures to Avoid Collision in Drosophila
Paper and Code
Mar 02, 2016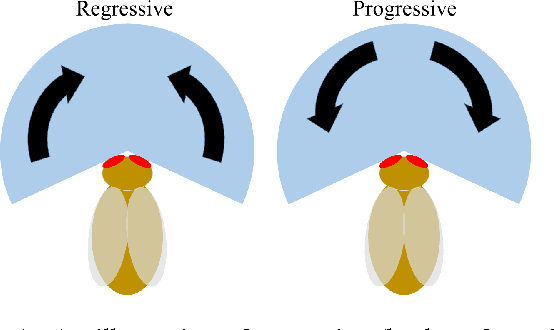


Flies that walk in a covered planar arena on straight paths avoid colliding with each other, but which of the two flies stops is not random. High-throughput video observations, coupled with dedicated experiments with controlled robot flies have revealed that flies utilize the type of optic flow on their retina as a determinant of who should stop, a strategy also used by ship captains to determine which of two ships on a collision course should throw engines in reverse. We use digital evolution to test whether this strategy evolves when collision avoidance is the sole penalty. We find that the strategy does indeed evolve in a narrow range of cost/benefit ratios, for experiments in which the "regressive motion" cue is error free. We speculate that these stringent conditions may not be sufficient to evolve the strategy in real flies, pointing perhaps to auxiliary costs and benefits not modeled in our study