 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMarkov Brains: A Technical Introduction
Sep 17, 2017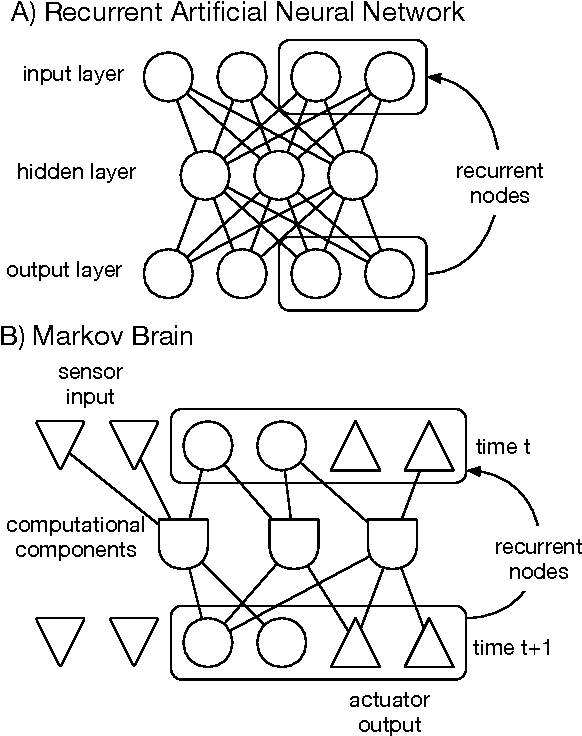
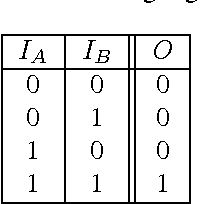
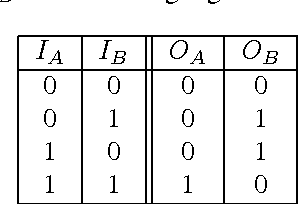

Markov Brains are a class of evolvable artificial neural networks (ANN). They differ from conventional ANNs in many aspects, but the key difference is that instead of a layered architecture, with each node performing the same function, Markov Brains are networks built from individual computational components. These computational components interact with each other, receive inputs from sensors, and control motor outputs. The function of the computational components, their connections to each other, as well as connections to sensors and motors are all subject to evolutionary optimization. Here we describe in detail how a Markov Brain works, what techniques can be used to study them, and how they can be evolved.
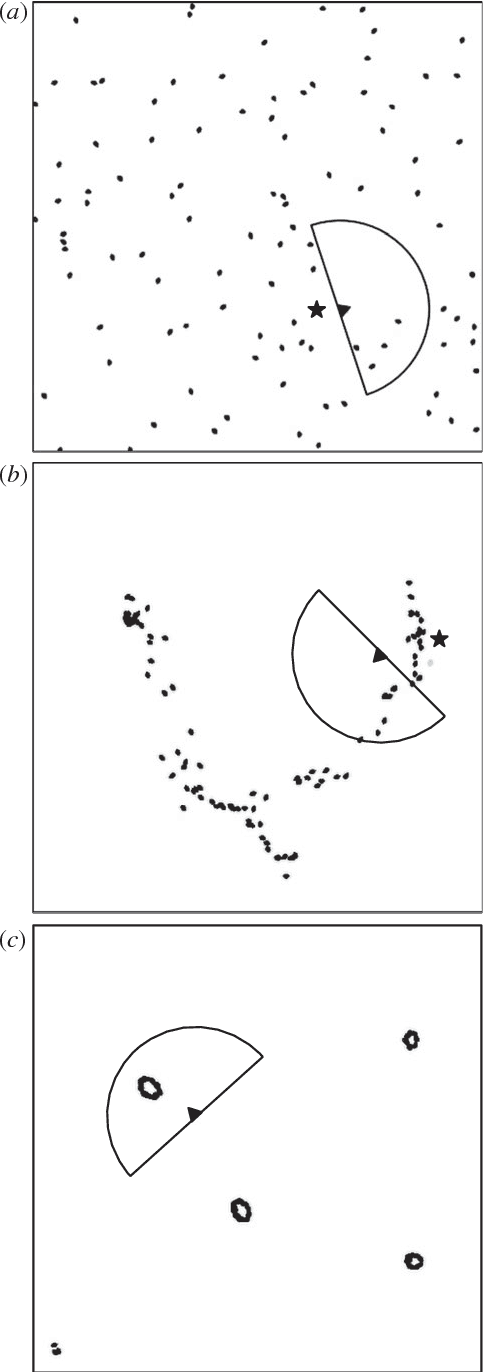
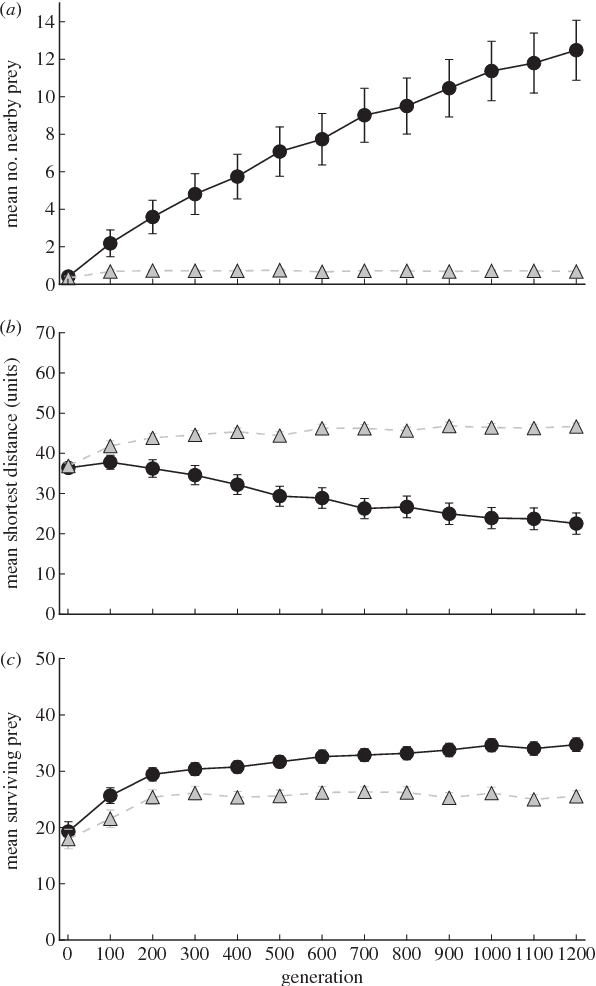
Evolution of swarming behavior is shaped by how predators attack
Nov 24, 2015Animal grouping behaviors have been widely studied due to their implications for understanding social intelligence, collective cognition, and potential applications in engineering, artificial intelligence, and robotics. An important biological aspect of these studies is discerning which selection pressures favor the evolution of grouping behavior. In the past decade, researchers have begun using evolutionary computation to study the evolutionary effects of these selection pressures in predator-prey models. The selfish herd hypothesis states that concentrated groups arise because prey selfishly attempt to place their conspecifics between themselves and the predator, thus causing an endless cycle of movement toward the center of the group. Using an evolutionary model of a predator-prey system, we show that how predators attack is critical to the evolution of the selfish herd. Following this discovery, we show that density-dependent predation provides an abstraction of Hamilton's original formulation of ``domains of danger.'' Finally, we verify that density-dependent predation provides a sufficient selective advantage for prey to evolve the selfish herd in response to predation by coevolving predators. Thus, our work corroborates Hamilton's selfish herd hypothesis in a digital evolutionary model, refines the assumptions of the selfish herd hypothesis, and generalizes the domain of danger concept to density-dependent predation.
Leveraging Evolutionary Search to Discover Self-Adaptive and Self-Organizing Cellular Automata
May 16, 2014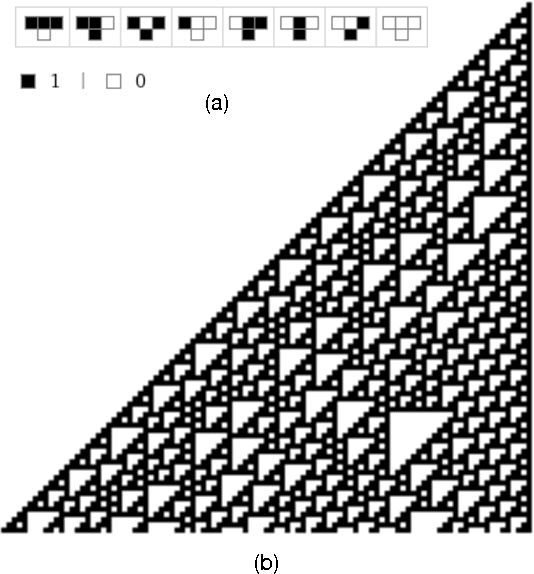
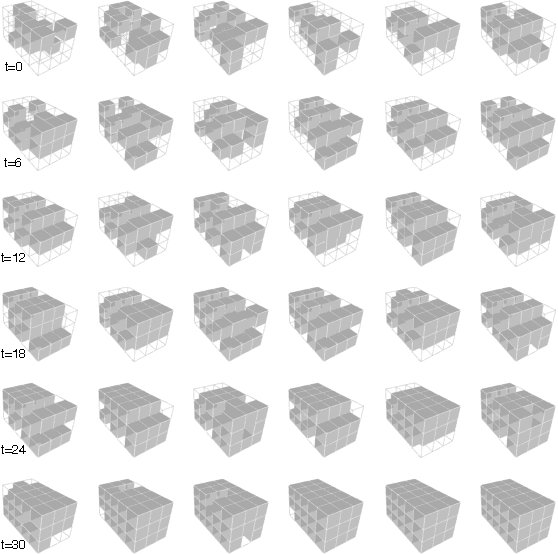
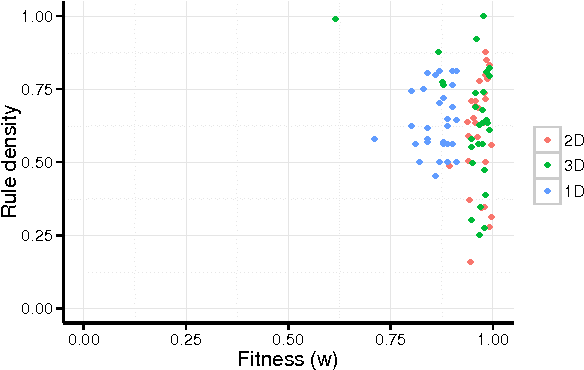

Building self-adaptive and self-organizing (SASO) systems is a challenging problem, in part because SASO principles are not yet well understood and few platforms exist for exploring them. Cellular automata (CA) are a well-studied approach to exploring the principles underlying self-organization. A CA comprises a lattice of cells whose states change over time based on a discrete update function. One challenge to developing CA is that the relationship of an update function, which describes the local behavior of each cell, to the global behavior of the entire CA is often unclear. As a result, many researchers have used stochastic search techniques, such as evolutionary algorithms, to automatically discover update functions that produce a desired global behavior. However, these update functions are typically defined in a way that does not provide for self-adaptation. Here we describe an approach to discovering CA update functions that are both self-adaptive and self-organizing. Specifically, we use a novel evolutionary algorithm-based approach to discover finite state machines (FSMs) that implement update functions for CA. We show how this approach is able to evolve FSM-based update functions that perform well on the density classification task for 1-, 2-, and 3-dimensional CA. Moreover, we show that these FSMs are self-adaptive, self-organizing, and highly scalable, often performing well on CA that are orders of magnitude larger than those used to evaluate performance during the evolutionary search. These results demonstrate that CA are a viable platform for studying the integration of self-adaptation and self-organization, and strengthen the case for using evolutionary algorithms as a component of SASO systems.
Predator confusion is sufficient to evolve swarming behavior
Apr 03, 2013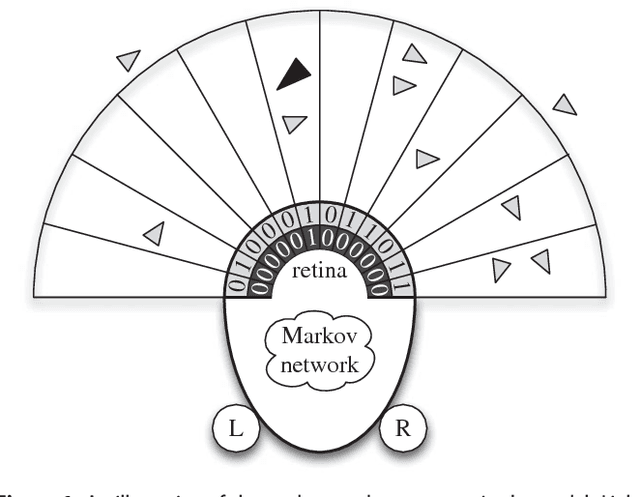
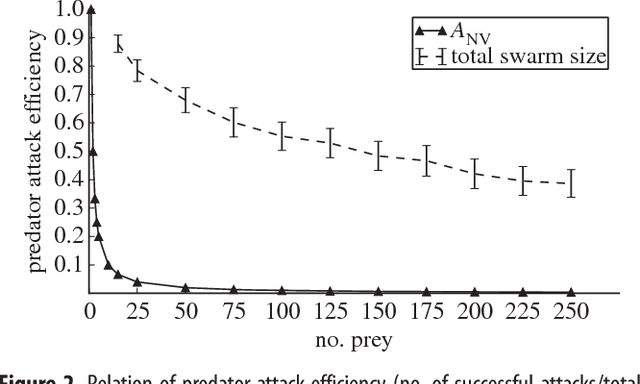
Swarming behaviors in animals have been extensively studied due to their implications for the evolution of cooperation, social cognition, and predator-prey dynamics. An important goal of these studies is discerning which evolutionary pressures favor the formation of swarms. One hypothesis is that swarms arise because the presence of multiple moving prey in swarms causes confusion for attacking predators, but it remains unclear how important this selective force is. Using an evolutionary model of a predator-prey system, we show that predator confusion provides a sufficient selection pressure to evolve swarming behavior in prey. Furthermore, we demonstrate that the evolutionary effect of predator confusion on prey could in turn exert pressure on the structure of the predator's visual field, favoring the frontally oriented, high-resolution visual systems commonly observed in predators that feed on swarming animals. Finally, we provide evidence that when prey evolve swarming in response to predator confusion, there is a change in the shape of the functional response curve describing the predator's consumption rate as prey density increases. Thus, we show that a relatively simple perceptual constraint--predator confusion--could have pervasive evolutionary effects on prey behavior, predator sensory mechanisms, and the ecological interactions between predators and prey.
* 11 pages, 6 figures. Supplementary information (including video files S1 and S5) in ancillary material. Videos S2-S4 are available from the authors upon request