 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Computational Complexity of Finding Stationary Points in Non-Convex Optimization
Oct 13, 2023Finding approximate stationary points, i.e., points where the gradient is approximately zero, of non-convex but smooth objective functions $f$ over unrestricted $d$-dimensional domains is one of the most fundamental problems in classical non-convex optimization. Nevertheless, the computational and query complexity of this problem are still not well understood when the dimension $d$ of the problem is independent of the approximation error. In this paper, we show the following computational and query complexity results: 1. The problem of finding approximate stationary points over unrestricted domains is PLS-complete. 2. For $d = 2$, we provide a zero-order algorithm for finding $\varepsilon$-approximate stationary points that requires at most $O(1/\varepsilon)$ value queries to the objective function. 3. We show that any algorithm needs at least $\Omega(1/\varepsilon)$ queries to the objective function and/or its gradient to find $\varepsilon$-approximate stationary points when $d=2$. Combined with the above, this characterizes the query complexity of this problem to be $\Theta(1/\varepsilon)$. 4. For $d = 2$, we provide a zero-order algorithm for finding $\varepsilon$-KKT points in constrained optimization problems that requires at most $O(1/\sqrt{\varepsilon})$ value queries to the objective function. This closes the gap between the works of Bubeck and Mikulincer [2020] and Vavasis [1993] and characterizes the query complexity of this problem to be $\Theta(1/\sqrt{\varepsilon})$. 5. Combining our results with the recent result of Fearnley et al. [2022], we show that finding approximate KKT points in constrained optimization is reducible to finding approximate stationary points in unconstrained optimization but the converse is impossible.
The Complexity of Gradient Descent: CLS = PPAD $\cap$ PLS
Nov 11, 2020
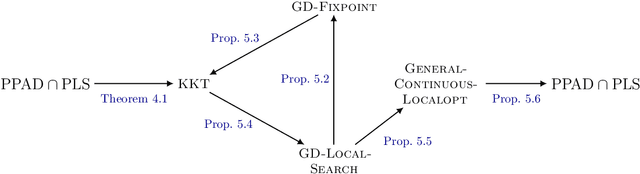
We study search problems that can be solved by performing Gradient Descent on a bounded convex polytopal domain and show that this class is equal to the intersection of two well-known classes: PPAD and PLS. As our main underlying technical contribution, we show that computing a Karush-Kuhn-Tucker (KKT) point of a continuously differentiable function over the domain $[0,1]^2$ is PPAD $\cap$ PLS-complete. This is the first natural problem to be shown complete for this class. Our results also imply that the class CLS (Continuous Local Search) - which was defined by Daskalakis and Papadimitriou as a more "natural" counterpart to PPAD $\cap$ PLS and contains many interesting problems - is itself equal to PPAD $\cap$ PLS.
Optimally Deceiving a Learning Leader in Stackelberg Games
Jun 11, 2020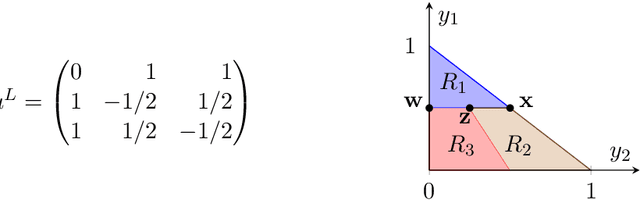
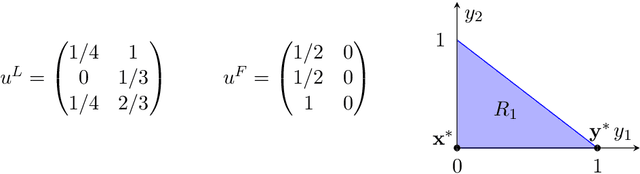
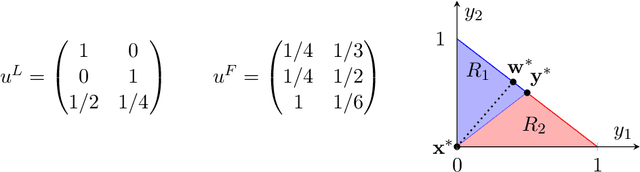
Recent results in the ML community have revealed that learning algorithms used to compute the optimal strategy for the leader to commit to in a Stackelberg game, are susceptible to manipulation by the follower. Such a learning algorithm operates by querying the best responses or the payoffs of the follower, who consequently can deceive the algorithm by responding as if his payoffs were much different than what they actually are. For this strategic behavior to be successful, the main challenge faced by the follower is to pinpoint the payoffs that would make the learning algorithm compute a commitment so that best responding to it maximizes the follower's utility, according to his true payoffs. While this problem has been considered before, the related literature only focused on the simplified scenario in which the payoff space is finite, thus leaving the general version of the problem unanswered. In this paper, we fill in this gap, by showing that it is always possible for the follower to compute (near-)optimal payoffs for various scenarios about the learning interaction between leader and follower.