 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSHARP 2020: The 1st Shape Recovery from Partial Textured 3D Scans Challenge Results
Oct 26, 2020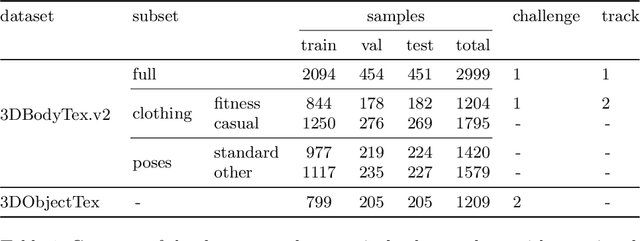
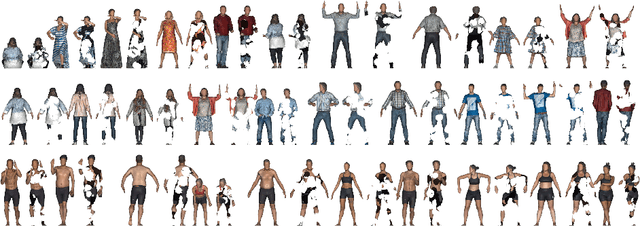
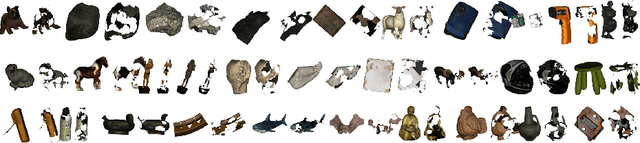
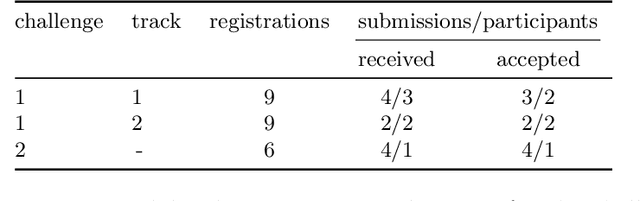
The SHApe Recovery from Partial textured 3D scans challenge, SHARP 2020, is the first edition of a challenge fostering and benchmarking methods for recovering complete textured 3D scans from raw incomplete data. SHARP 2020 is organised as a workshop in conjunction with ECCV 2020. There are two complementary challenges, the first one on 3D human scans, and the second one on generic objects. Challenge 1 is further split into two tracks, focusing, first, on large body and clothing regions, and, second, on fine body details. A novel evaluation metric is proposed to quantify jointly the shape reconstruction, the texture reconstruction and the amount of completed data. Additionally, two unique datasets of 3D scans are proposed, to provide raw ground-truth data for the benchmarks. The datasets are released to the scientific community. Moreover, an accompanying custom library of software routines is also released to the scientific community. It allows for processing 3D scans, generating partial data and performing the evaluation. Results of the competition, analysed in comparison to baselines, show the validity of the proposed evaluation metrics, and highlight the challenging aspects of the task and of the datasets. Details on the SHARP 2020 challenge can be found at https://cvi2.uni.lu/sharp2020/.
3DBooSTeR: 3D Body Shape and Texture Recovery
Oct 23, 2020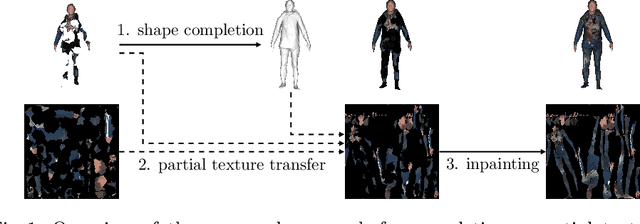
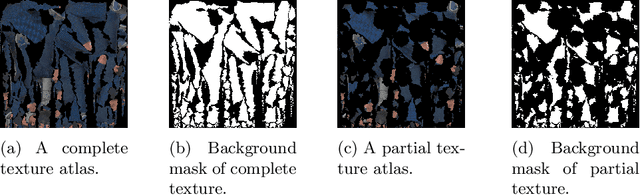
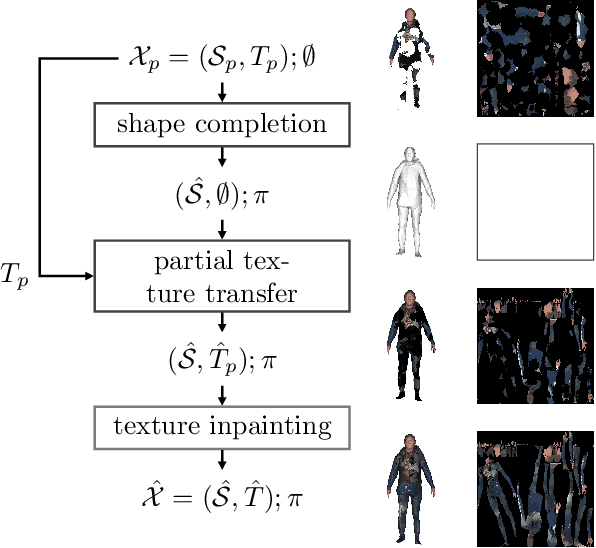
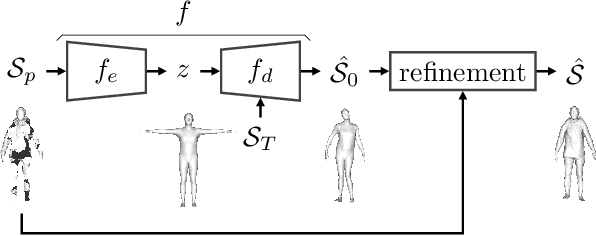
We propose 3DBooSTeR, a novel method to recover a textured 3D body mesh from a textured partial 3D scan. With the advent of virtual and augmented reality, there is a demand for creating realistic and high-fidelity digital 3D human representations. However, 3D scanning systems can only capture the 3D human body shape up to some level of defects due to its complexity, including occlusion between body parts, varying levels of details, shape deformations and the articulated skeleton. Textured 3D mesh completion is thus important to enhance 3D acquisitions. The proposed approach decouples the shape and texture completion into two sequential tasks. The shape is recovered by an encoder-decoder network deforming a template body mesh. The texture is subsequently obtained by projecting the partial texture onto the template mesh before inpainting the corresponding texture map with a novel approach. The approach is validated on the 3DBodyTex.v2 dataset.
Towards Generalization of 3D Human Pose Estimation In The Wild
Apr 21, 2020

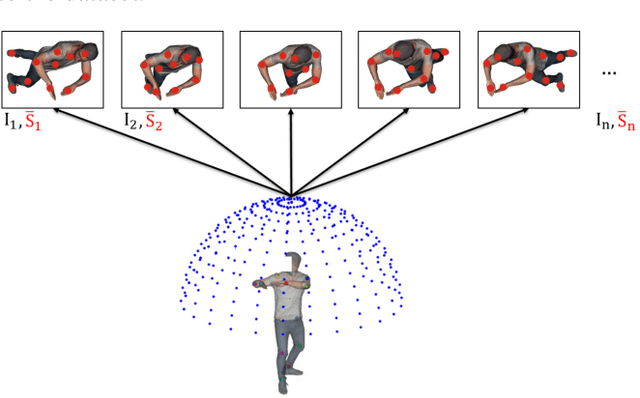
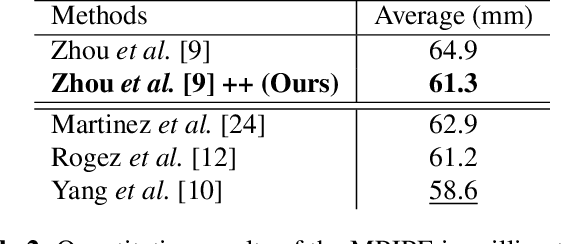
In this paper, we propose 3DBodyTex.Pose, a dataset that addresses the task of 3D human pose estimation in-the-wild. Generalization to in-the-wild images remains limited due to the lack of adequate datasets. Existent ones are usually collected in indoor controlled environments where motion capture systems are used to obtain the 3D ground-truth annotations of humans. 3DBodyTex.Pose offers high quality and rich data containing 405 different real subjects in various clothing and poses, and 81k image samples with ground-truth 2D and 3D pose annotations. These images are generated from 200 viewpoints among which 70 challenging extreme viewpoints. This data was created starting from high resolution textured 3D body scans and by incorporating various realistic backgrounds. Retraining a state-of-the-art 3D pose estimation approach using data augmented with 3DBodyTex.Pose showed promising improvement in the overall performance, and a sensible decrease in the per joint position error when testing on challenging viewpoints. The 3DBodyTex.Pose is expected to offer the research community with new possibilities for generalizing 3D pose estimation from monocular in-the-wild images.
Deep Learning Advances on Different 3D Data Representations: A Survey
Aug 04, 2018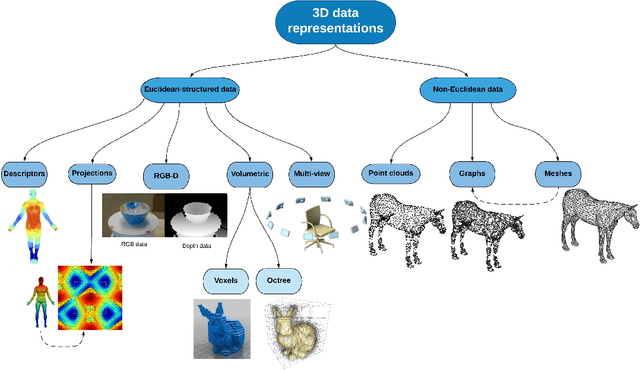
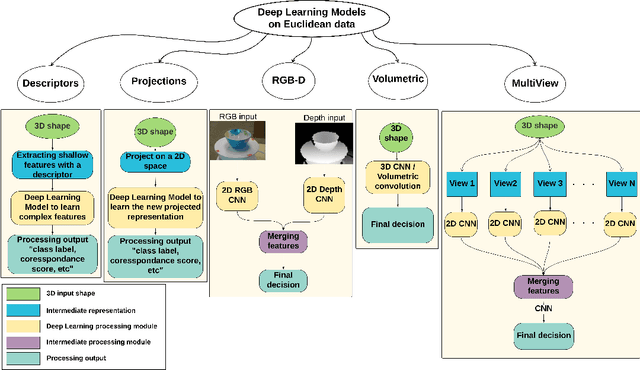
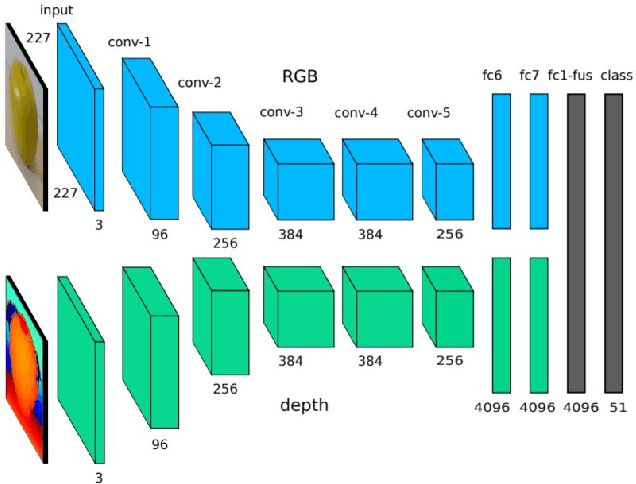
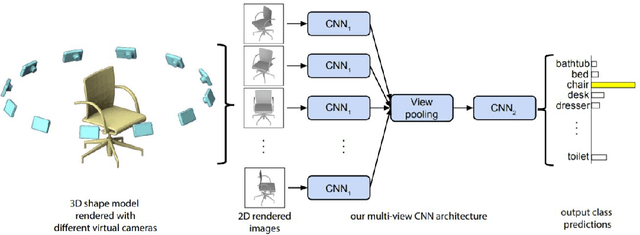
3D data is a valuable asset in the field of computer vision as it provides rich information about the full geometry of sensed objects and scenes. With the recent availability of large 3D datasets and the increase in computational power, it is today possible to consider applying deep learning to learn specific tasks on 3D data such as segmentation, recognition and correspondence. Depending on the considered 3D data representation, different challenges may be foreseen in using existent deep learning architectures. In this paper, we provide a comprehensive overview of various 3D data representations highlighting the difference between Euclidean and non-Euclidean ones. We also discuss how deep learning methods are applied on each representation, analyzing the challenges to overcome.