 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging Foundation Models To learn the shape of semi-fluid deformable objects
Nov 25, 2024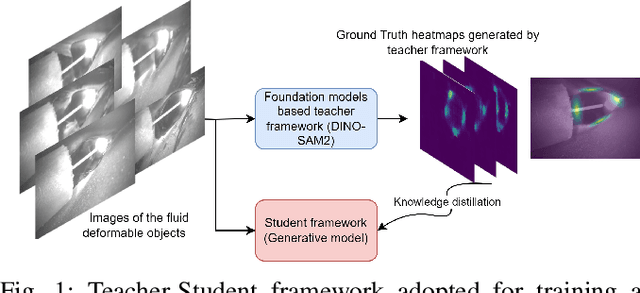
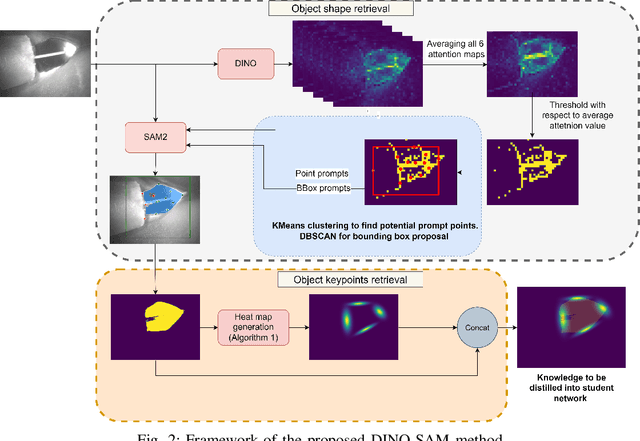
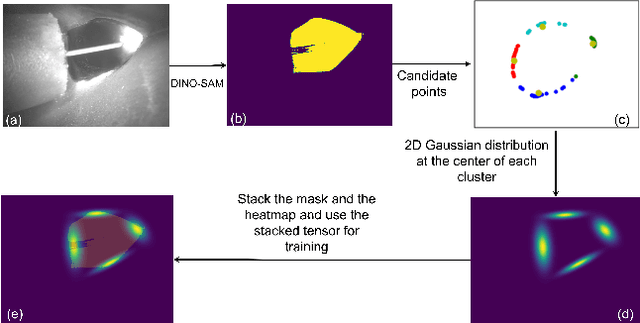
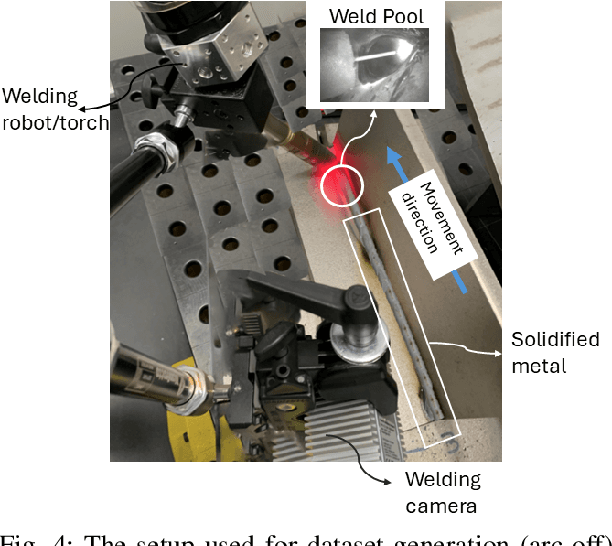
One of the difficulties imposed on the manipulation of deformable objects is their characterization and the detection of representative keypoints for the purpose of manipulation. A keen interest was manifested by researchers in the last decade to characterize and manipulate deformable objects of non-fluid nature, such as clothes and ropes. Even though several propositions were made in the regard of object characterization, however researchers were always confronted with the need of pixel-level information of the object through images to extract relevant information. This usually is accomplished by means of segmentation networks trained on manually labeled data for this purpose. In this paper, we address the subject of characterizing weld pool to define stable features that serve as information for further motion control objectives. We achieve this by employing different pipelines. The first one consists of characterizing fluid deformable objects through the use of a generative model that is trained using a teacher-student framework. And in the second one we leverage foundation models by using them as teachers to characterize the object in the image, without the need of any pre-training and any dataset. The performance of knowledge distillation from foundation models into a smaller generative model shows prominent results in the characterization of deformable objects. The student network was capable of learning to retrieve the keypoitns of the object with an error of 13.4 pixels. And the teacher was evaluated based on its capacities to retrieve pixel level information represented by the object mask, with a mean Intersection Over Union (mIoU) of 75.26%.
SHARP 2020: The 1st Shape Recovery from Partial Textured 3D Scans Challenge Results
Oct 26, 2020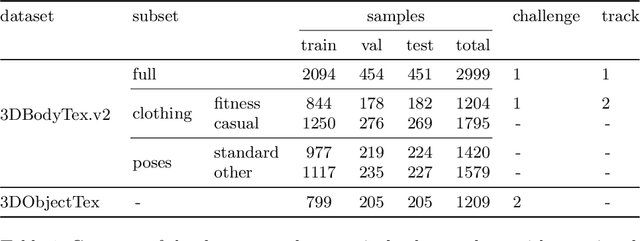
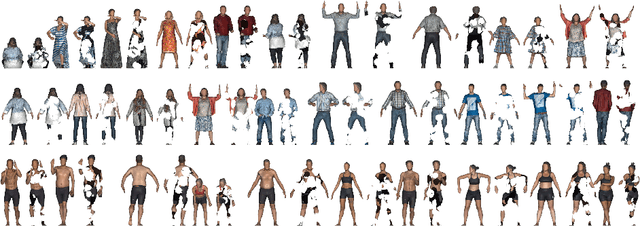
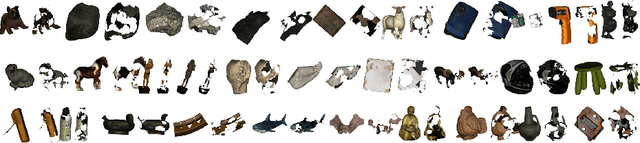
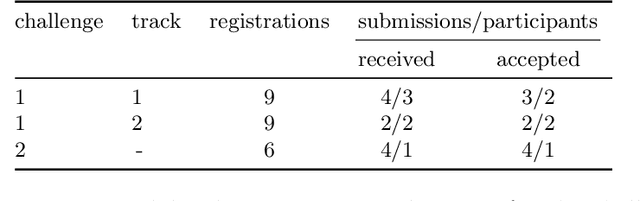
The SHApe Recovery from Partial textured 3D scans challenge, SHARP 2020, is the first edition of a challenge fostering and benchmarking methods for recovering complete textured 3D scans from raw incomplete data. SHARP 2020 is organised as a workshop in conjunction with ECCV 2020. There are two complementary challenges, the first one on 3D human scans, and the second one on generic objects. Challenge 1 is further split into two tracks, focusing, first, on large body and clothing regions, and, second, on fine body details. A novel evaluation metric is proposed to quantify jointly the shape reconstruction, the texture reconstruction and the amount of completed data. Additionally, two unique datasets of 3D scans are proposed, to provide raw ground-truth data for the benchmarks. The datasets are released to the scientific community. Moreover, an accompanying custom library of software routines is also released to the scientific community. It allows for processing 3D scans, generating partial data and performing the evaluation. Results of the competition, analysed in comparison to baselines, show the validity of the proposed evaluation metrics, and highlight the challenging aspects of the task and of the datasets. Details on the SHARP 2020 challenge can be found at https://cvi2.uni.lu/sharp2020/.
Bi-objective Framework for Sensor Fusion in RGB-D Multi-View Systems: Applications in Calibration
May 23, 2019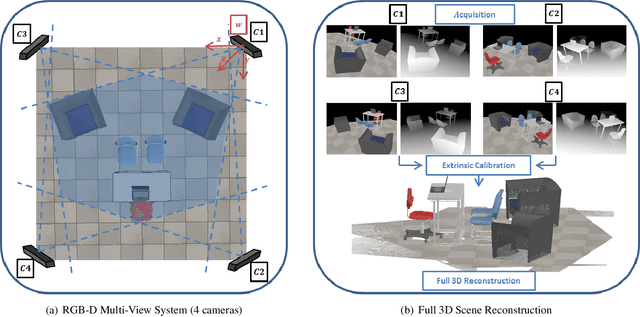
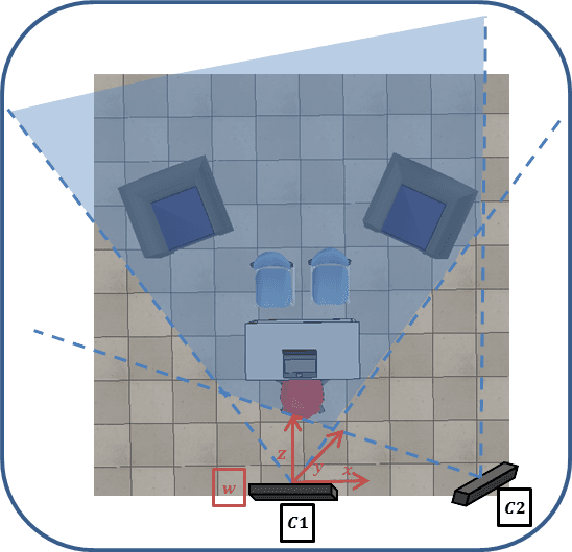
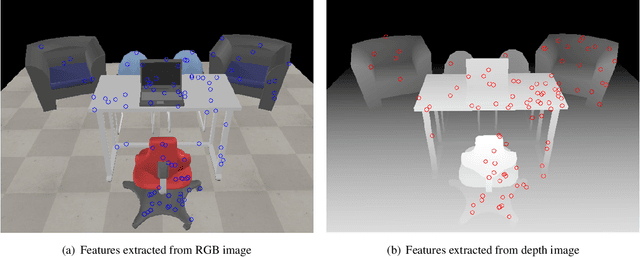
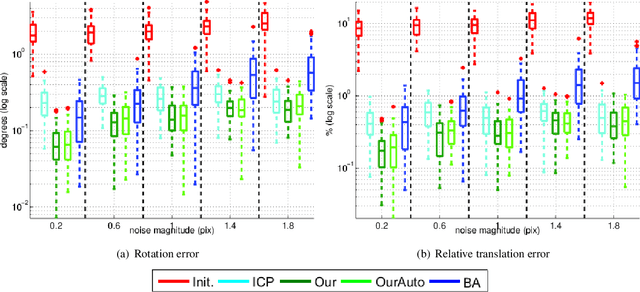
Complete and textured 3D reconstruction of dynamic scenes has been facilitated by mapped RGB and depth information acquired by RGB-D cameras based multi-view systems. One of the most critical steps in such multi-view systems is to determine the relative poses of all cameras via a process known as extrinsic calibration. In this work, we propose a sensor fusion framework based on a weighted bi-objective optimization for refinement of extrinsic calibration tailored for RGB-D multi-view systems. The weighted bi-objective cost function, which makes use of 2D information from RGB images and 3D information from depth images, is analytically derived via the Maximum Likelihood (ML) method. The weighting factor appears as a function of noise in 2D and 3D measurements and takes into account the affect of residual errors on the optimization. We propose an iterative scheme to estimate noise variances in 2D and 3D measurements, for simultaneously computing the weighting factor together with the camera poses. An extensive quantitative and qualitative evaluation of the proposed approach shows improved calibration performance as compared to refinement schemes which use only 2D or 3D measurement information.