 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDance Style Recognition Using Laban Movement Analysis
Apr 29, 2025



The growing interest in automated movement analysis has presented new challenges in recognition of complex human activities including dance. This study focuses on dance style recognition using features extracted using Laban Movement Analysis. Previous studies for dance style recognition often focus on cross-frame movement analysis, which limits the ability to capture temporal context and dynamic transitions between movements. This gap highlights the need for a method that can add temporal context to LMA features. For this, we introduce a novel pipeline which combines 3D pose estimation, 3D human mesh reconstruction, and floor aware body modeling to effectively extract LMA features. To address the temporal limitation, we propose a sliding window approach that captures movement evolution across time in features. These features are then used to train various machine learning methods for classification, and their explainability explainable AI methods to evaluate the contribution of each feature to classification performance. Our proposed method achieves a highest classification accuracy of 99.18\% which shows that the addition of temporal context significantly improves dance style recognition performance.
Emotion Recognition in Contemporary Dance Performances Using Laban Movement Analysis
Apr 29, 2025



This paper presents a novel framework for emotion recognition in contemporary dance by improving existing Laban Movement Analysis (LMA) feature descriptors and introducing robust, novel descriptors that capture both quantitative and qualitative aspects of the movement. Our approach extracts expressive characteristics from 3D keypoints data of professional dancers performing contemporary dance under various emotional states, and trains multiple classifiers, including Random Forests and Support Vector Machines. Additionally, we provide in-depth explanation of features and their impact on model predictions using explainable machine learning methods. Overall, our study improves emotion recognition in contemporary dance and offers promising applications in performance analysis, dance training, and human--computer interaction, with a highest accuracy of 96.85\%.
Survey of 3D Human Body Pose and Shape Estimation Methods for Contemporary Dance Applications
Jan 04, 20243D human body shape and pose estimation from RGB images is a challenging problem with potential applications in augmented/virtual reality, healthcare and fitness technology and virtual retail. Recent solutions have focused on three types of inputs: i) single images, ii) multi-view images and iii) videos. In this study, we surveyed and compared 3D body shape and pose estimation methods for contemporary dance and performing arts, with a special focus on human body pose and dressing, camera viewpoint, illumination conditions and background conditions. We demonstrated that multi-frame methods, such as PHALP, provide better results than single-frame method for pose estimation when dancers are performing contemporary dances.
Rule-Based Classification of Hyperspectral Imaging Data
Jul 21, 2021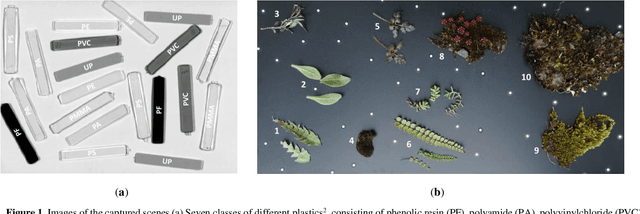
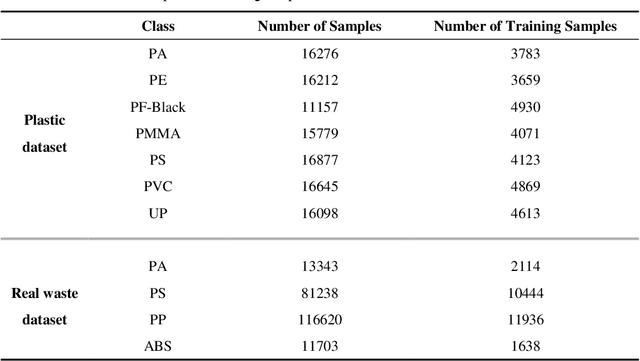
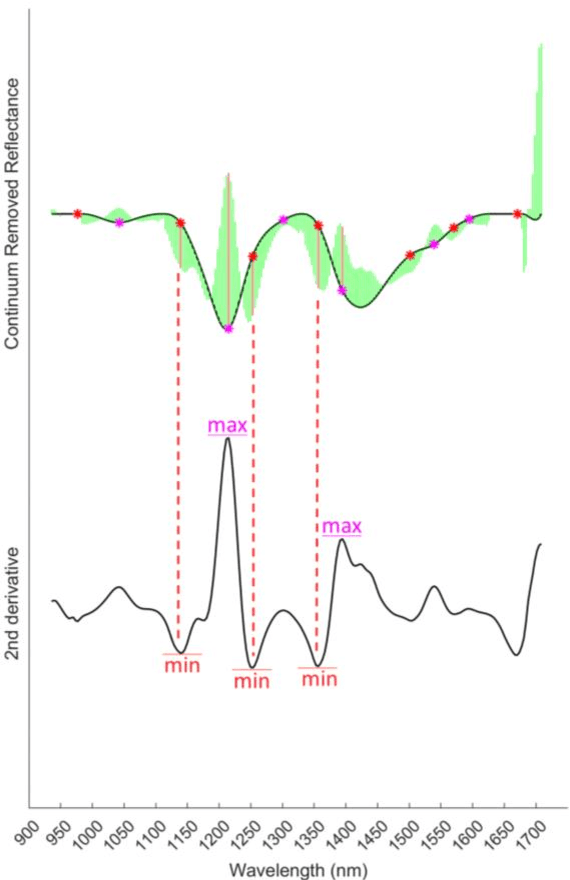
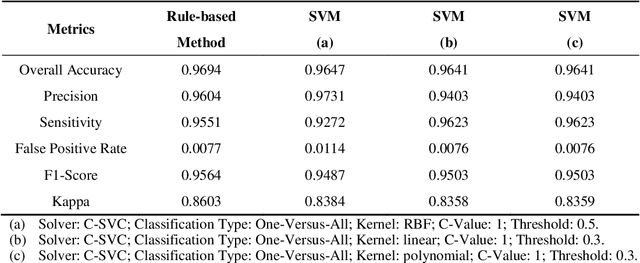
Due to its high spatial and spectral information content, hyperspectral imaging opens up new possibilities for a better understanding of data and scenes in a wide variety of applications. An essential part of this process of understanding is the classification part. In this article we present a general classification approach based on the shape of spectral signatures. In contrast to classical classification approaches (e.g. SVM, KNN), not only reflectance values are considered, but also parameters such as curvature points, curvature values, and the curvature behavior of spectral signatures are used to develop shape-describing rules in order to use them for classification by a rule-based procedure using IF-THEN queries. The flexibility and efficiency of the methodology is demonstrated using datasets from two different application fields and leads to convincing results with good performance.
Deep Learning for Material recognition: most recent advances and open challenges
Dec 14, 2020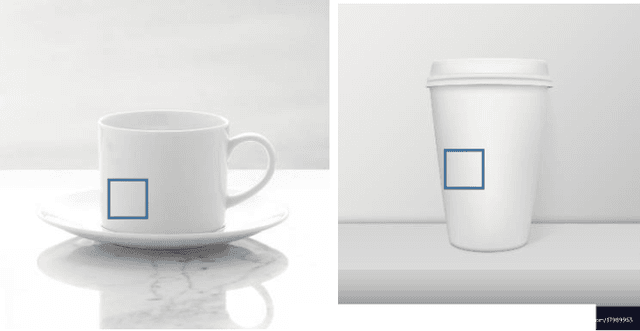
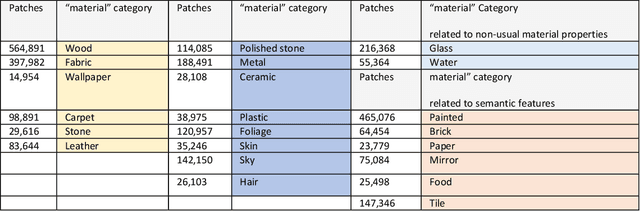
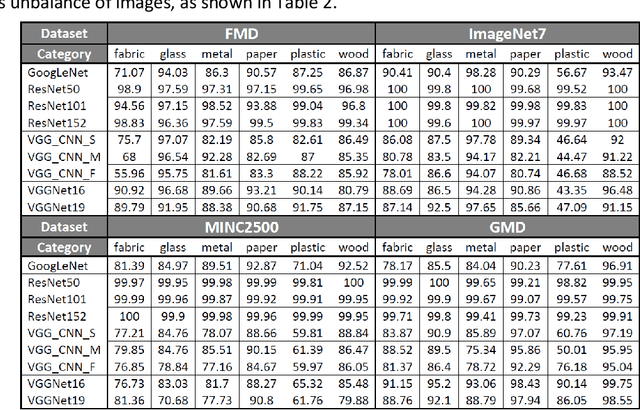
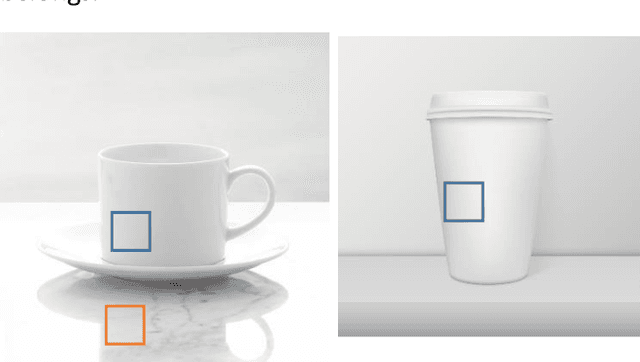
Recognizing material from color images is still a challenging problem today. While deep neural networks provide very good results on object recognition and has been the topic of a huge amount of papers in the last decade, their adaptation to material images still requires some works to reach equivalent accuracies. Nevertheless, recent studies achieve very good results in material recognition with deep learning and we propose, in this paper, to review most of them by focusing on three aspects: material image datasets, influence of the context and ad hoc descriptors for material appearance. Every aspect is introduced by a systematic manner and results from representative works are cited. We also present our own studies in this area and point out some open challenges for future works.
Deep Spectral Reflectance and Illuminant Estimation from Self-Interreflections
Dec 09, 2018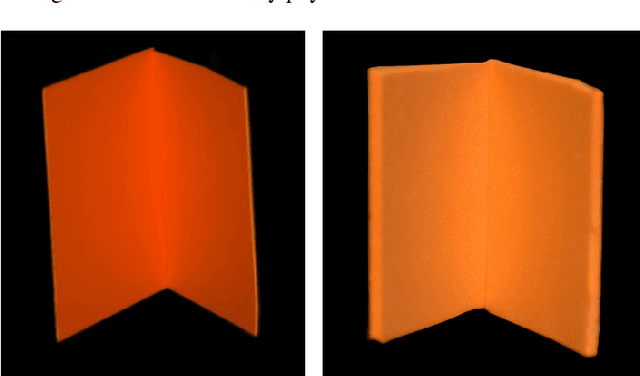
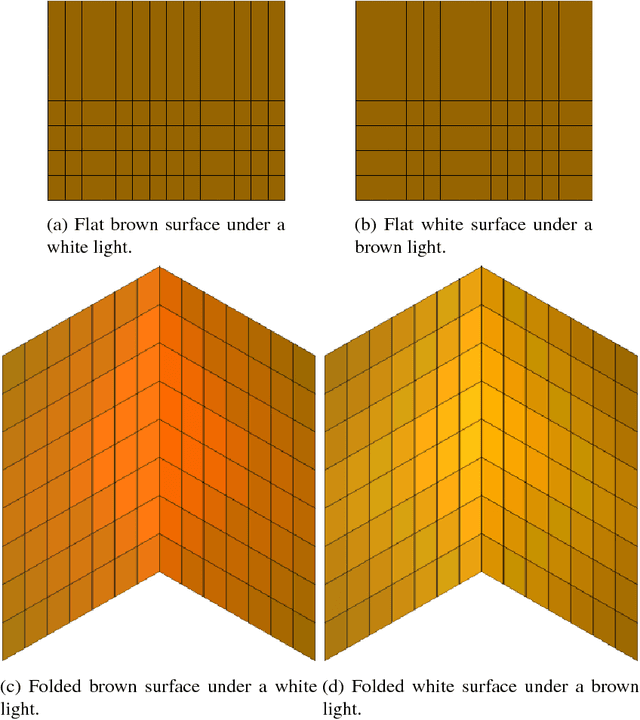
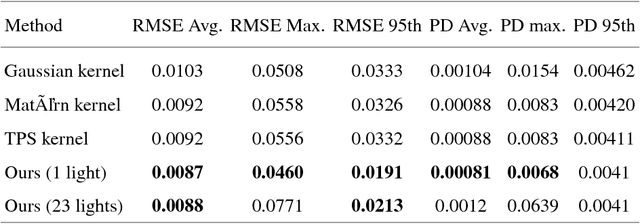
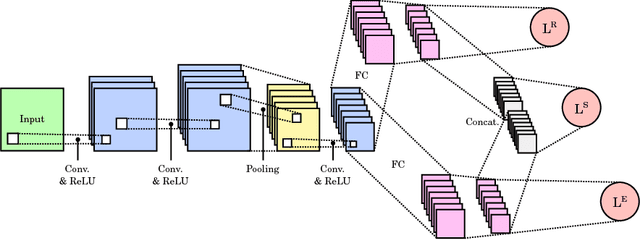
In this work, we propose a CNN-based approach to estimate the spectral reflectance of a surface and the spectral power distribution of the light from a single RGB image of a V-shaped surface. Interreflections happening in a concave surface lead to gradients of RGB values over its area. These gradients carry a lot of information concerning the physical properties of the surface and the illuminant. Our network is trained with only simulated data constructed using a physics-based interreflection model. Coupling interreflection effects with deep learning helps to retrieve the spectral reflectance under an unknown light and to estimate the spectral power distribution of this light as well. In addition, it is more robust to the presence of image noise than the classical approaches. Our results show that the proposed approach outperforms the state of the art learning-based approaches on simulated data. In addition, it gives better results on real data compared to other interreflection-based approaches.
Spectral reflectance estimation from one RGB image using self-interreflections in a concave object
Mar 05, 2018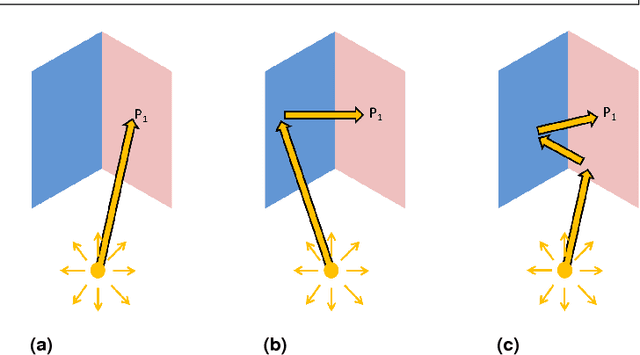
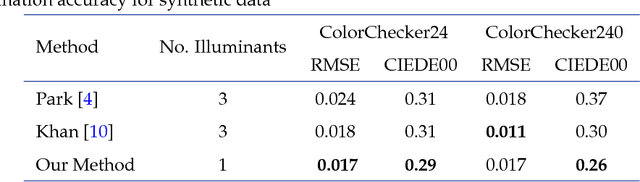
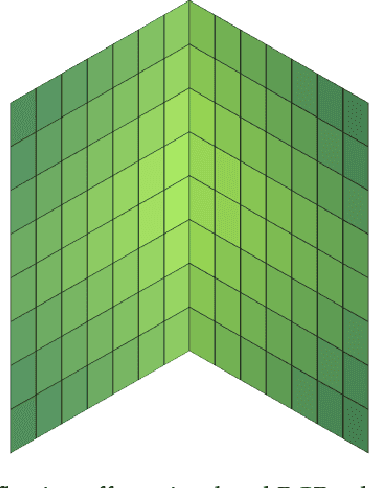
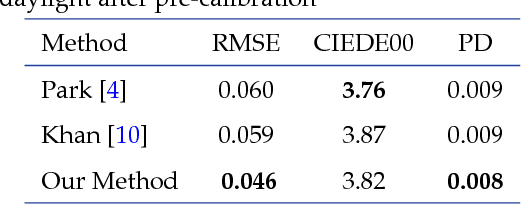
Light interreflections occurring in a concave object generate a color gradient which is characteristic of the object's spectral reflectance. In this paper, we use this property in order to estimate the spectral reflectance of matte, uniformly colored, V-shaped surfaces from a single RGB image taken under directional lighting. First, simulations show that using one image of the concave object is equivalent to, and can even outperform, the state of the art approaches based on three images taken under three lightings with different colors. Experiments on real images of folded papers were performed under unmeasured direct sunlight. The results show that our interreflection-based approach outperforms existing approaches even when the latter are improved by a calibration step. The mathematical solution for the interreflection equation and the effect of surface parameters on the performance of the method are also discussed in this paper.
Residual Conv-Deconv Grid Network for Semantic Segmentation
Jul 26, 2017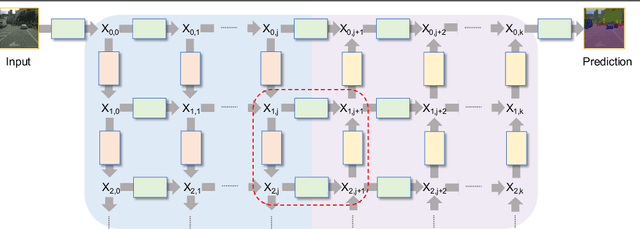
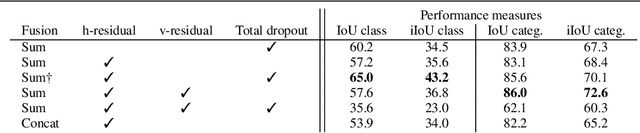
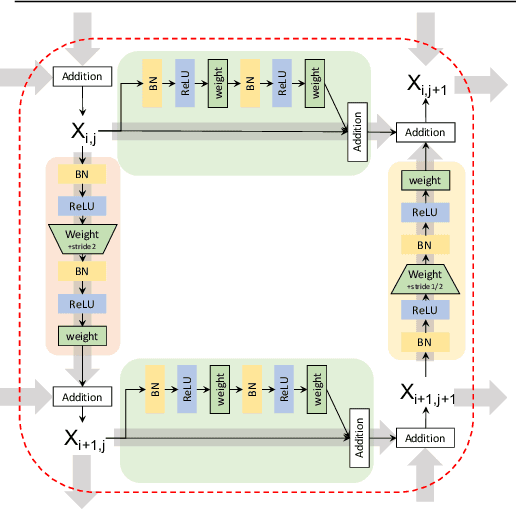

This paper presents GridNet, a new Convolutional Neural Network (CNN) architecture for semantic image segmentation (full scene labelling). Classical neural networks are implemented as one stream from the input to the output with subsampling operators applied in the stream in order to reduce the feature maps size and to increase the receptive field for the final prediction. However, for semantic image segmentation, where the task consists in providing a semantic class to each pixel of an image, feature maps reduction is harmful because it leads to a resolution loss in the output prediction. To tackle this problem, our GridNet follows a grid pattern allowing multiple interconnected streams to work at different resolutions. We show that our network generalizes many well known networks such as conv-deconv, residual or U-Net networks. GridNet is trained from scratch and achieves competitive results on the Cityscapes dataset.
Autonomous navigation for low-altitude UAVs in urban areas
Feb 25, 2016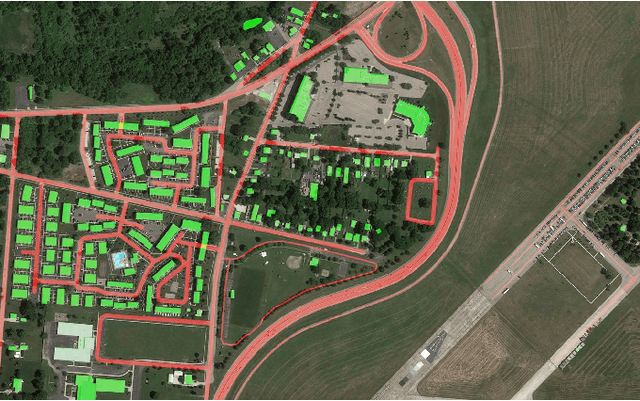
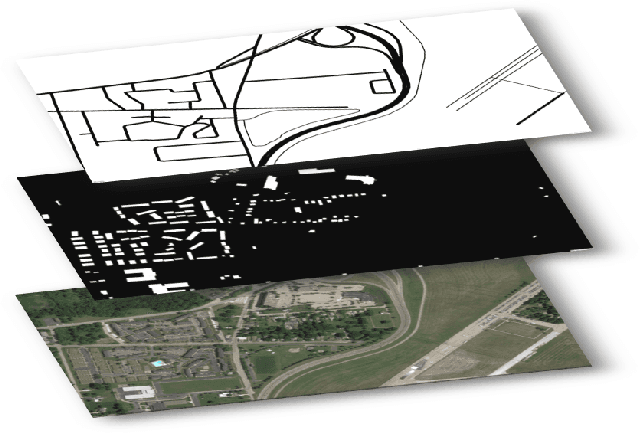
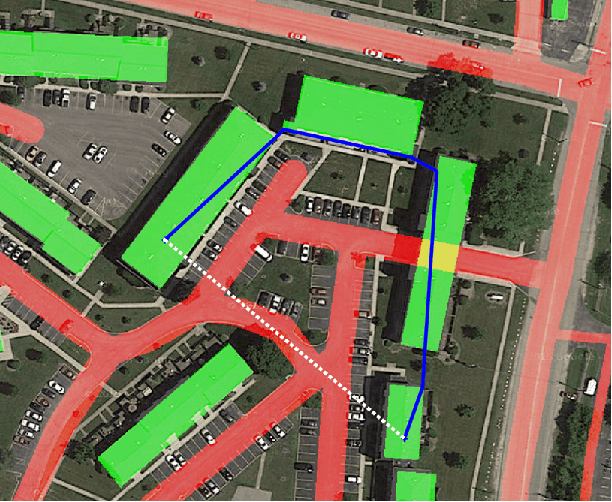
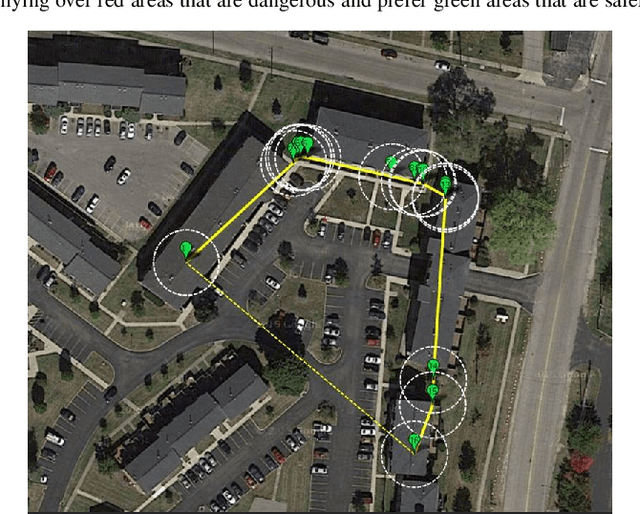
In recent years, consumer Unmanned Aerial Vehicles have become very popular, everyone can buy and fly a drone without previous experience, which raises concern in regards to regulations and public safety. In this paper, we present a novel approach towards enabling safe operation of such vehicles in urban areas. Our method uses geodetically accurate dataset images with Geographical Information System (GIS) data of road networks and buildings provided by Google Maps, to compute a weighted A* shortest path from start to end locations of a mission. Weights represent the potential risk of injuries for individuals in all categories of land-use, i.e. flying over buildings is considered safer than above roads. We enable safe UAV operation in regards to 1- land-use by computing a static global path dependent on environmental structures, and 2- avoiding flying over moving objects such as cars and pedestrians by dynamically optimizing the path locally during the flight. As all input sources are first geo-registered, pixels and GPS coordinates are equivalent, it therefore allows us to generate an automated and user-friendly mission with GPS waypoints readable by consumer drones' autopilots. We simulated 54 missions and show significant improvement in maximizing UAV's standoff distance to moving objects with a quantified safety parameter over 40 times better than the naive straight line navigation.
Data Fusion of Objects Using Techniques Such as Laser Scanning, Structured Light and Photogrammetry for Cultural Heritage Applications
May 07, 2015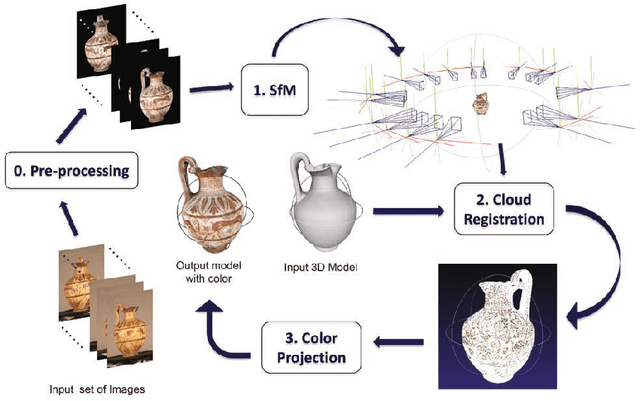
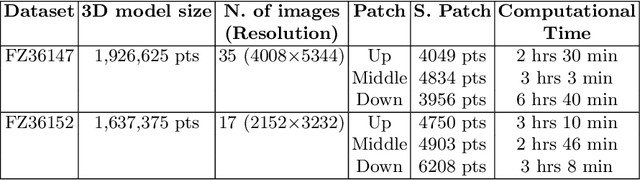
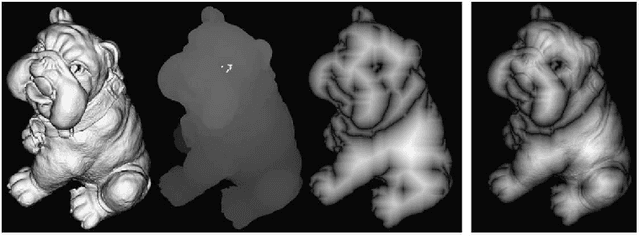
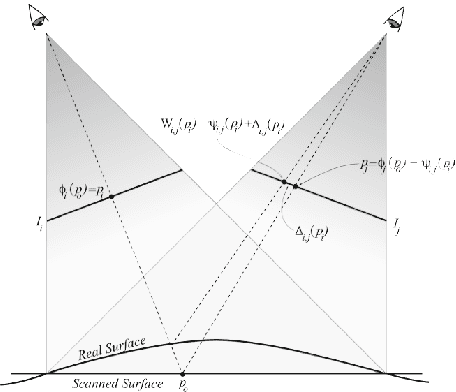
In this paper we present a semi-automatic 2D-3D local registration pipeline capable of coloring 3D models obtained from 3D scanners by using uncalibrated images. The proposed pipeline exploits the Structure from Motion (SfM) technique in order to reconstruct a sparse representation of the 3D object and obtain the camera parameters from image feature matches. We then coarsely register the reconstructed 3D model to the scanned one through the Scale Iterative Closest Point (SICP) algorithm. SICP provides the global scale, rotation and translation parameters, using minimal manual user intervention. In the final processing stage, a local registration refinement algorithm optimizes the color projection of the aligned photos on the 3D object removing the blurring/ghosting artefacts introduced due to small inaccuracies during the registration. The proposed pipeline is capable of handling real world cases with a range of characteristics from objects with low level geometric features to complex ones.