 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData Fusion of Objects Using Techniques Such as Laser Scanning, Structured Light and Photogrammetry for Cultural Heritage Applications
May 07, 2015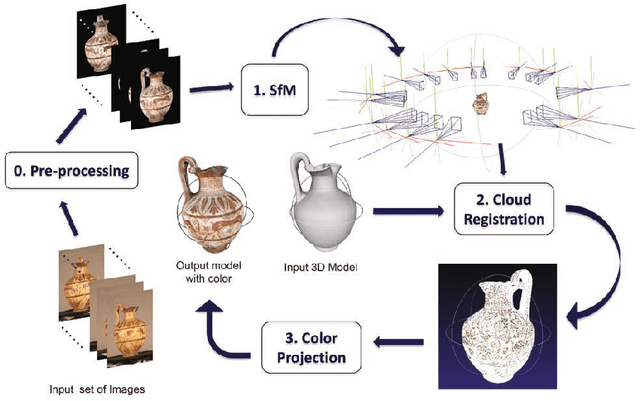
In this paper we present a semi-automatic 2D-3D local registration pipeline capable of coloring 3D models obtained from 3D scanners by using uncalibrated images. The proposed pipeline exploits the Structure from Motion (SfM) technique in order to reconstruct a sparse representation of the 3D object and obtain the camera parameters from image feature matches. We then coarsely register the reconstructed 3D model to the scanned one through the Scale Iterative Closest Point (SICP) algorithm. SICP provides the global scale, rotation and translation parameters, using minimal manual user intervention. In the final processing stage, a local registration refinement algorithm optimizes the color projection of the aligned photos on the 3D object removing the blurring/ghosting artefacts introduced due to small inaccuracies during the registration. The proposed pipeline is capable of handling real world cases with a range of characteristics from objects with low level geometric features to complex ones.