 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBack to the Feature: Learning Robust Camera Localization from Pixels to Pose
Apr 07, 2021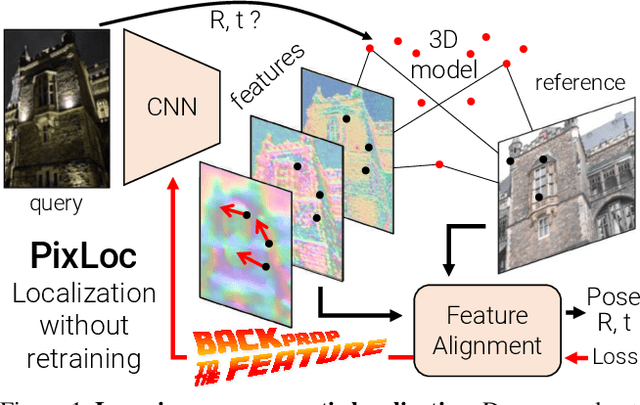
Camera pose estimation in known scenes is a 3D geometry task recently tackled by multiple learning algorithms. Many regress precise geometric quantities, like poses or 3D points, from an input image. This either fails to generalize to new viewpoints or ties the model parameters to a specific scene. In this paper, we go Back to the Feature: we argue that deep networks should focus on learning robust and invariant visual features, while the geometric estimation should be left to principled algorithms. We introduce PixLoc, a scene-agnostic neural network that estimates an accurate 6-DoF pose from an image and a 3D model. Our approach is based on the direct alignment of multiscale deep features, casting camera localization as metric learning. PixLoc learns strong data priors by end-to-end training from pixels to pose and exhibits exceptional generalization to new scenes by separating model parameters and scene geometry. The system can localize in large environments given coarse pose priors but also improve the accuracy of sparse feature matching by jointly refining keypoints and poses with little overhead. The code will be publicly available at https://github.com/cvg/pixloc.
Battery Model Calibration with Deep Reinforcement Learning
Dec 07, 2020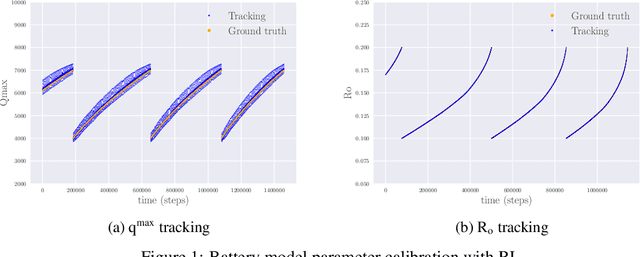
Lithium-Ion (Li-I) batteries have recently become pervasive and are used in many physical assets. To enable a good prediction of the end of discharge of batteries, detailed electrochemical Li-I battery models have been developed. Their parameters are typically calibrated before they are taken into operation and are typically not re-calibrated during operation. However, since battery performance is affected by aging, the reality gap between the computational battery models and the real physical systems leads to inaccurate predictions. A supervised machine learning algorithm would require an extensive representative training dataset mapping the observation to the ground truth calibration parameters. This may be infeasible for many practical applications. In this paper, we implement a Reinforcement Learning-based framework for reliably and efficiently inferring calibration parameters of battery models. The framework enables real-time inference of the computational model parameters in order to compensate the reality-gap from the observations. Most importantly, the proposed methodology does not need any labeled data samples, (samples of observations and the ground truth calibration parameters). Furthermore, the framework does not require any information on the underlying physical model. The experimental results demonstrate that the proposed methodology is capable of inferring the model parameters with high accuracy and high robustness. While the achieved results are comparable to those obtained with supervised machine learning, they do not rely on the ground truth information during training.