 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLAtte: Hyperbolic Lorentz Attention for Cross-Subject EEG Classification
Mar 11, 2026Electroencephalogram (EEG) classification is critical for applications ranging from medical diagnostics to brain-computer interfaces, yet it remains challenging due to the inherently low signal-to-noise ratio (SNR) and high inter-subject variability. To address these issues, we propose LAtte, a novel framework that integrates a Lorentz Attention Module with an InceptionTime-based encoder to enable robust and generalizable EEG classification. Unlike prior work, which evaluates primarily on single-subject performance, LAtte focuses on cross-subject training. First, we learn a shared baseline signal across all subjects using pretraining tasks to capture common underlying patterns. Then, we utilize novel Lorentz low-rank adapters to learn subject-specific embeddings that model individual differences. This allows us to learn a shared model that performs robustly across subjects, and can be subsequently finetuned for individual subjects or used to generalize to unseen subjects. We evaluate LAtte on three well-established EEG datasets, achieving a substantial improvement in performance over current state-of-the-art methods.
HexFormer: Hyperbolic Vision Transformer with Exponential Map Aggregation
Jan 27, 2026Data across modalities such as images, text, and graphs often contains hierarchical and relational structures, which are challenging to model within Euclidean geometry. Hyperbolic geometry provides a natural framework for representing such structures. Building on this property, this work introduces HexFormer, a hyperbolic vision transformer for image classification that incorporates exponential map aggregation within its attention mechanism. Two designs are explored: a hyperbolic ViT (HexFormer) and a hybrid variant (HexFormer-Hybrid) that combines a hyperbolic encoder with an Euclidean linear classification head. HexFormer incorporates a novel attention mechanism based on exponential map aggregation, which yields more accurate and stable aggregated representations than standard centroid based averaging, showing that simpler approaches retain competitive merit. Experiments across multiple datasets demonstrate consistent performance improvements over Euclidean baselines and prior hyperbolic ViTs, with the hybrid variant achieving the strongest overall results. Additionally, this study provides an analysis of gradient stability in hyperbolic transformers. The results reveal that hyperbolic models exhibit more stable gradients and reduced sensitivity to warmup strategies compared to Euclidean architectures, highlighting their robustness and efficiency in training. Overall, these findings indicate that hyperbolic geometry can enhance vision transformer architectures by improving gradient stability and accuracy. In addition, relatively simple mechanisms such as exponential map aggregation can provide strong practical benefits.
Optimizing Curvature Learning for Robust Hyperbolic Deep Learning in Computer Vision
May 22, 2024Hyperbolic deep learning has become a growing research direction in computer vision for the unique properties afforded by the alternate embedding space. The negative curvature and exponentially growing distance metric provide a natural framework for capturing hierarchical relationships between datapoints and allowing for finer separability between their embeddings. However, these methods are still computationally expensive and prone to instability, especially when attempting to learn the negative curvature that best suits the task and the data. Current Riemannian optimizers do not account for changes in the manifold which greatly harms performance and forces lower learning rates to minimize projection errors. Our paper focuses on curvature learning by introducing an improved schema for popular learning algorithms and providing a novel normalization approach to constrain embeddings within the variable representative radius of the manifold. Additionally, we introduce a novel formulation for Riemannian AdamW, and alternative hybrid encoder techniques and foundational formulations for current convolutional hyperbolic operations, greatly reducing the computational penalty of the hyperbolic embedding space. Our approach demonstrates consistent performance improvements across both direct classification and hierarchical metric learning tasks while allowing for larger hyperbolic models.
Hyperbolic Geometry in Computer Vision: A Novel Framework for Convolutional Neural Networks
Mar 28, 2023
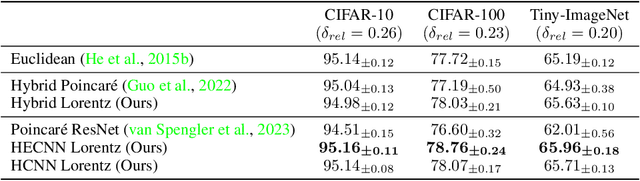

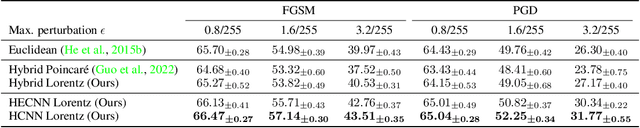
Real-world visual data exhibit intrinsic hierarchical structures that can be represented effectively in hyperbolic spaces. Hyperbolic neural networks (HNNs) are a promising approach for learning feature representations in such spaces. However, current methods in computer vision rely on Euclidean backbones and only project features to the hyperbolic space in the task heads, limiting their ability to fully leverage the benefits of hyperbolic geometry. To address this, we present HCNN, the first fully hyperbolic convolutional neural network (CNN) designed for computer vision tasks. Based on the Lorentz model, we generalize fundamental components of CNNs and propose novel formulations of the convolutional layer, batch normalization, and multinomial logistic regression (MLR). Experimentation on standard vision tasks demonstrates the effectiveness of our HCNN framework and the Lorentz model in both hybrid and fully hyperbolic settings. Overall, we aim to pave the way for future research in hyperbolic computer vision by offering a new paradigm for interpreting and analyzing visual data. Our code is publicly available at https://github.com/kschwethelm/HyperbolicCV.
Attention, Filling in The Gaps for Generalization in Routing Problems
Jul 14, 2022
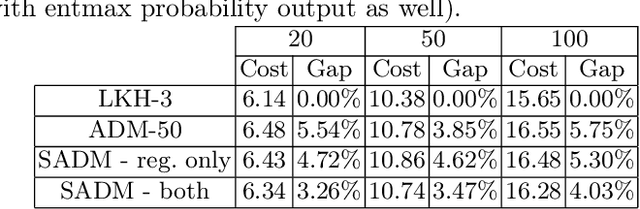
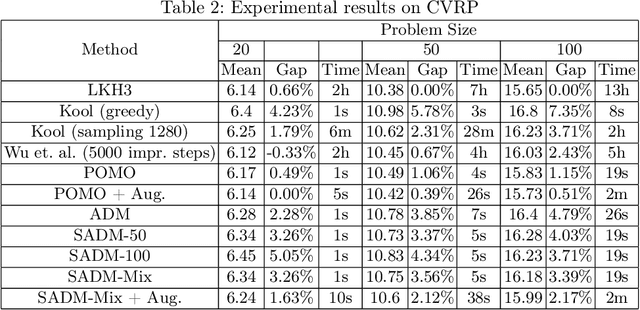
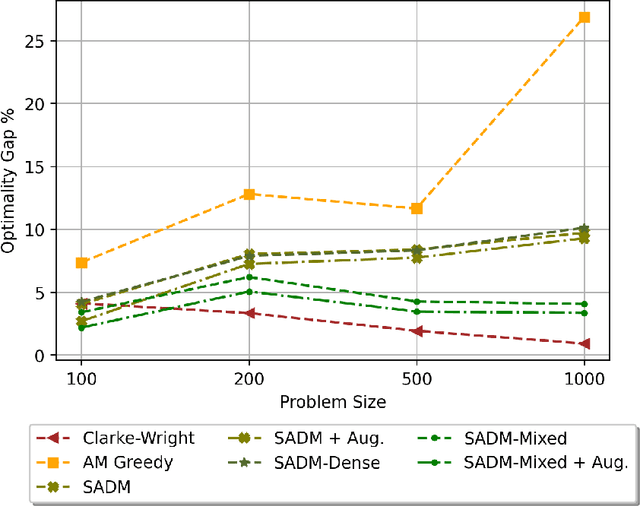
Machine Learning (ML) methods have become a useful tool for tackling vehicle routing problems, either in combination with popular heuristics or as standalone models. However, current methods suffer from poor generalization when tackling problems of different sizes or different distributions. As a result, ML in vehicle routing has witnessed an expansion phase with new methodologies being created for particular problem instances that become infeasible at larger problem sizes. This paper aims at encouraging the consolidation of the field through understanding and improving current existing models, namely the attention model by Kool et al. We identify two discrepancy categories for VRP generalization. The first is based on the differences that are inherent to the problems themselves, and the second relates to architectural weaknesses that limit the model's ability to generalize. Our contribution becomes threefold: We first target model discrepancies by adapting the Kool et al. method and its loss function for Sparse Dynamic Attention based on the alpha-entmax activation. We then target inherent differences through the use of a mixed instance training method that has been shown to outperform single instance training in certain scenarios. Finally, we introduce a framework for inference level data augmentation that improves performance by leveraging the model's lack of invariance to rotation and dilation changes.
Learning to Control Local Search for Combinatorial Optimization
Jun 27, 2022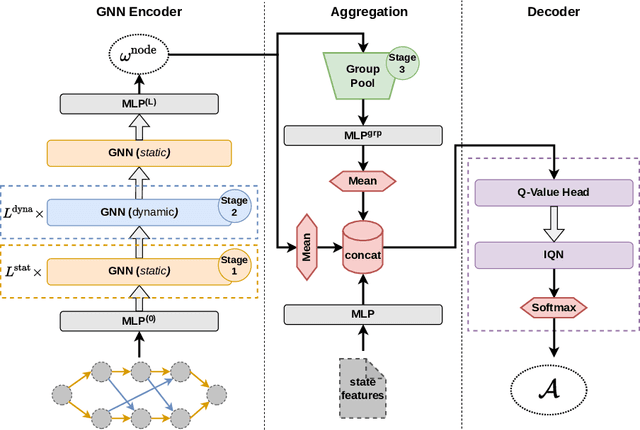
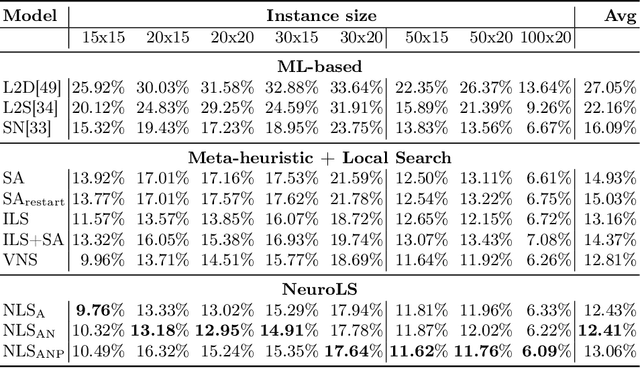
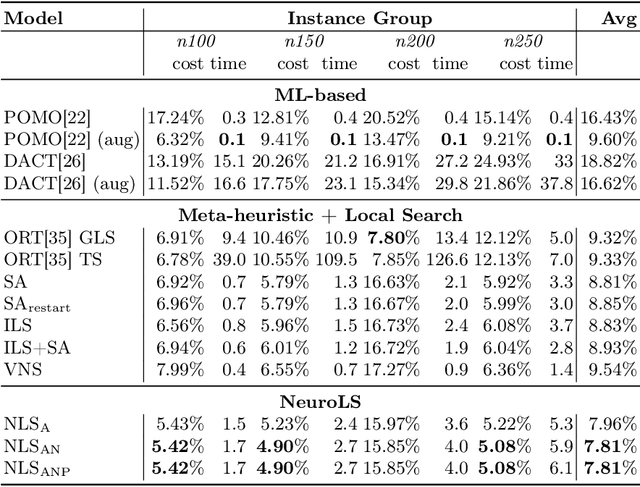
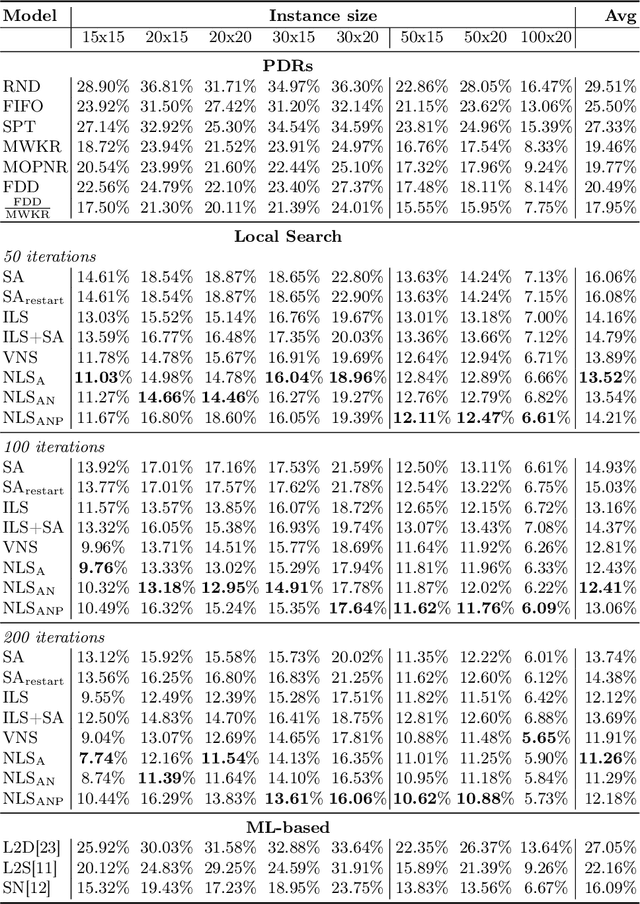
Combinatorial optimization problems are encountered in many practical contexts such as logistics and production, but exact solutions are particularly difficult to find and usually NP-hard for considerable problem sizes. To compute approximate solutions, a zoo of generic as well as problem-specific variants of local search is commonly used. However, which variant to apply to which particular problem is difficult to decide even for experts. In this paper we identify three independent algorithmic aspects of such local search algorithms and formalize their sequential selection over an optimization process as Markov Decision Process (MDP). We design a deep graph neural network as policy model for this MDP, yielding a learned controller for local search called NeuroLS. Ample experimental evidence shows that NeuroLS is able to outperform both, well-known general purpose local search controllers from Operations Research as well as latest machine learning-based approaches.
RP-DQN: An application of Q-Learning to Vehicle Routing Problems
Apr 25, 2021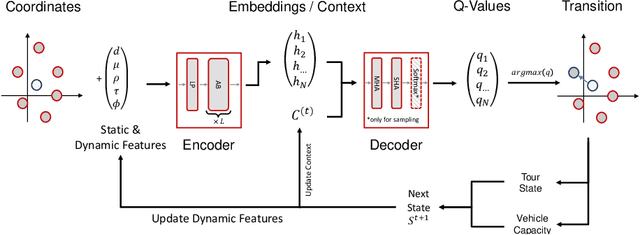
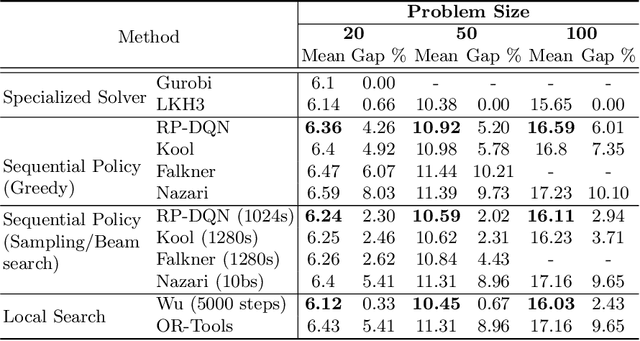
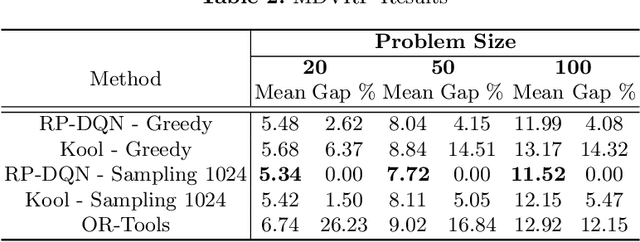
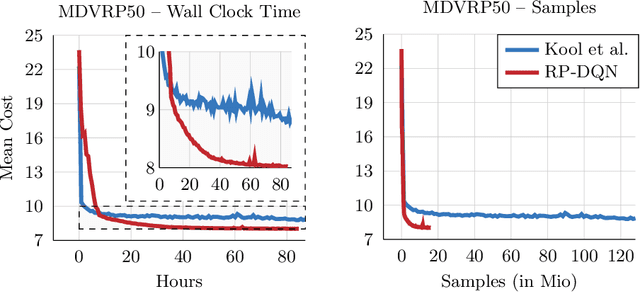
In this paper we present a new approach to tackle complex routing problems with an improved state representation that utilizes the model complexity better than previous methods. We enable this by training from temporal differences. Specifically Q-Learning is employed. We show that our approach achieves state-of-the-art performance for autoregressive policies that sequentially insert nodes to construct solutions on the CVRP. Additionally, we are the first to tackle the MDVRP with machine learning methods and demonstrate that this problem type greatly benefits from our approach over other ML methods.