 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed and Rate-Adaptive Feature Compression
Apr 02, 2024



We study the problem of distributed and rate-adaptive feature compression for linear regression. A set of distributed sensors collect disjoint features of regressor data. A fusion center is assumed to contain a pretrained linear regression model, trained on a dataset of the entire uncompressed data. At inference time, the sensors compress their observations and send them to the fusion center through communication-constrained channels, whose rates can change with time. Our goal is to design a feature compression {scheme} that can adapt to the varying communication constraints, while maximizing the inference performance at the fusion center. We first obtain the form of optimal quantizers assuming knowledge of underlying regressor data distribution. Under a practically reasonable approximation, we then propose a distributed compression scheme which works by quantizing a one-dimensional projection of the sensor data. We also propose a simple adaptive scheme for handling changes in communication constraints. We demonstrate the effectiveness of the distributed adaptive compression scheme through simulated experiments.
Uncovering multifunctional mechano-intelligence in and through phononic metastructures harnessing physical reservoir computing
May 30, 2023The recent advances in autonomous systems have prompted a strong demand for the next generation of adaptive structures and materials to possess more built-in intelligence in their mechanical domain, the so-called mechano-intelligence (MI). Previous MI attempts mainly focused on specific designs and case studies to realize limited aspects of MI, and there is a lack of a systematic foundation in constructing and integrating the different elements of intelligence in an effective and efficient manner. Here, we propose a new approach to create the needed foundation in realizing integrated multifunctional MI via a physical reservoir computing (PRC) framework. That is, to concurrently embody computing power and the various elements of intelligence, namely perception, decision-making, and commanding, directly in the mechanical domain, advancing from conventional adaptive structures that rely solely on add-on digital computers and massive electronics to achieve intelligence. As an exemplar platform, we construct a mechanically intelligent phononic metastructure with the integrated elements of MI by harnessing the PRC power hidden in their high-degree-of-freedom nonlinear dynamics. Through analyses and experimental investigations, we uncover multiple adaptive structural functions ranging from self-tuning wave controls to wave-based logic gates. This research will provide the basis for creating future new structures that would greatly surpass the state of the art - such as lower power consumption, more direct interactions, and much better survivability in harsh environment or under cyberattacks. Moreover, it will enable the addition of new functions and autonomy to systems without overburdening the onboard computers.
Robust Mean Estimation in High Dimensions via $\ell_0$ Minimization
Aug 21, 2020



We study the robust mean estimation problem in high dimensions, where $\alpha <0.5$ fraction of the data points can be arbitrarily corrupted. Motivated by compressive sensing, we formulate the robust mean estimation problem as the minimization of the $\ell_0$-`norm' of the outlier indicator vector, under second moment constraints on the inlier data points. We prove that the global minimum of this objective is order optimal for the robust mean estimation problem, and we propose a general framework for minimizing the objective. We further leverage the $\ell_1$ and $\ell_p$ $(0<p<1)$, minimization techniques in compressive sensing to provide computationally tractable solutions to the $\ell_0$ minimization problem. Both synthetic and real data experiments demonstrate that the proposed algorithms significantly outperform state-of-the-art robust mean estimation methods.
Sequential Controlled Sensing for Composite Multihypothesis Testing
Oct 24, 2019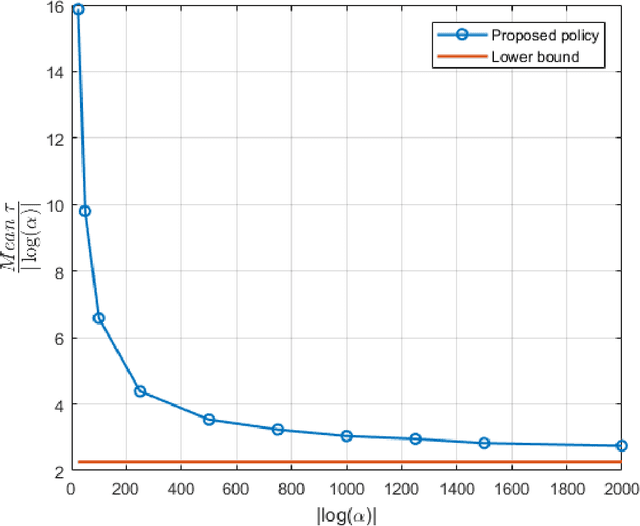
The problem of multi-hypothesis testing with controlled sensing of observations is considered. The distribution of observations collected under each control is assumed to follow a single-parameter exponential family distribution. The goal is to design a policy to find the true hypothesis with minimum expected delay while ensuring that the probability of error is below a given constraint. The decision-maker can control the delay by intelligently choosing the control for observation collection in each time slot. We derive a policy that satisfies the given constraint on the error probability. We also show that the policy is asymptotically optimal in the sense that it asymptotically achieves an information-theoretic lower bound on the expected delay.
Design, Analysis & Prototyping of a Semi-Automated Staircase-Climbing Rehabilitation Robot
Sep 21, 2018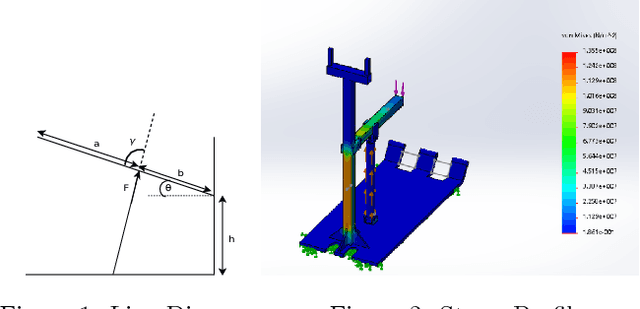
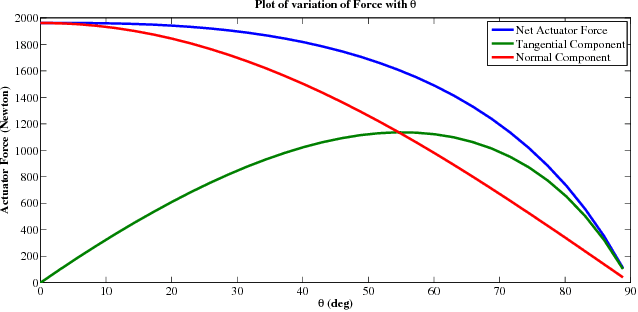
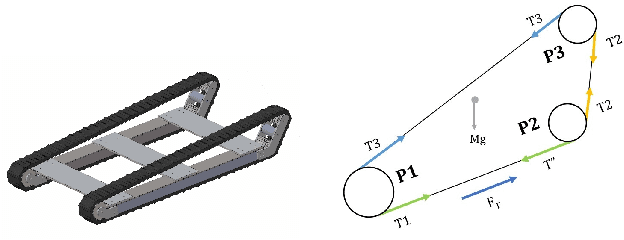
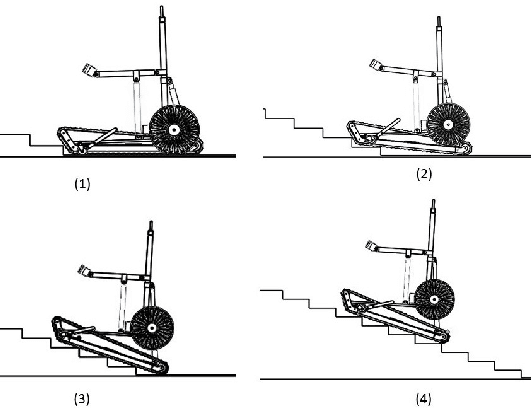
In this paper, we describe the mechanical design, system overview, integration and control techniques associated with SKALA, a unique large-sized robot for carrying a person with physical disabilities, up and down staircases. As a regular wheelchair is unable to perform such a maneuver, the system functions as a non-conventional wheelchair with several intelligent features. We describe the unique mechanical design and the design choices associated with it. We showcase the embedded control architecture that allows for several different modes of teleoperation, all of which have been described in detail. We further investigate the architecture associated with the autonomous operation of the system.