 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Clustering in Stochastic Bandits
Jan 14, 2026We study the Bandit Clustering (BC) problem under the fixed confidence setting, where the objective is to group a collection of data sequences (arms) into clusters through sequential sampling from adaptively selected arms at each time step while ensuring a fixed error probability at the stopping time. We consider a setting where arms in a cluster may have different distributions. Unlike existing results in this setting, which assume Gaussian-distributed arms, we study a broader class of vector-parametric distributions that satisfy mild regularity conditions. Existing asymptotically optimal BC algorithms require solving an optimization problem as part of their sampling rule at each step, which is computationally costly. We propose an Efficient Bandit Clustering algorithm (EBC), which, instead of solving the full optimization problem, takes a single step toward the optimal value at each time step, making it computationally efficient while remaining asymptotically optimal. We also propose a heuristic variant of EBC, called EBC-H, which further simplifies the sampling rule, with arm selection based on quantities computed as part of the stopping rule. We highlight the computational efficiency of EBC and EBC-H by comparing their per-sample run time with that of existing algorithms. The asymptotic optimality of EBC is supported through simulations on the synthetic datasets. Through simulations on both synthetic and real-world datasets, we show the performance gain of EBC and EBC-H over existing approaches.
Sequential Spectral Clustering of Data Sequences
Sep 11, 2025


We study the problem of nonparametric clustering of data sequences, where each data sequence comprises i.i.d. samples generated from an unknown distribution. The true clusters are the clusters obtained using the Spectral clustering algorithm (SPEC) on the pairwise distance between the true distributions corresponding to the data sequences. Since the true distributions are unknown, the objective is to estimate the clusters by observing the minimum number of samples from the data sequences for a given error probability. To solve this problem, we propose the Sequential Spectral clustering algorithm (SEQ-SPEC), and show that it stops in finite time almost surely and is exponentially consistent. We also propose a computationally more efficient algorithm called the Incremental Approximate Sequential Spectral clustering algorithm (IA-SEQ-SPEC). Through simulations, we show that both our proposed algorithms perform better than the fixed sample size SPEC, the Sequential $K$-Medoids clustering algorithm (SEQ-KMED) and the Sequential Single Linkage clustering algorithm (SEQ-SLINK). The IA-SEQ-SPEC, while being computationally efficient, performs close to SEQ-SPEC on both synthetic and real-world datasets. To the best of our knowledge, this is the first work on spectral clustering of data sequences under a sequential framework.
Online Clustering with Bandit Information
Jan 20, 2025We study the problem of online clustering within the multi-armed bandit framework under the fixed confidence setting. In this multi-armed bandit problem, we have $M$ arms, each providing i.i.d. samples that follow a multivariate Gaussian distribution with an {\em unknown} mean and a known unit covariance. The arms are grouped into $K$ clusters based on the distance between their means using the Single Linkage (SLINK) clustering algorithm on the means of the arms. Since the true means are unknown, the objective is to obtain the above clustering of the arms with the minimum number of samples drawn from the arms, subject to an upper bound on the error probability. We introduce a novel algorithm, Average Tracking Bandit Online Clustering (ATBOC), and prove that this algorithm is order optimal, meaning that the upper bound on its expected sample complexity for given error probability $\delta$ is within a factor of 2 of an instance-dependent lower bound as $\delta \rightarrow 0$. Furthermore, we propose a computationally more efficient algorithm, Lower and Upper Confidence Bound-based Bandit Online Clustering (LUCBBOC), inspired by the LUCB algorithm for best arm identification. Simulation results demonstrate that the performance of LUCBBOC is comparable to that of ATBOC. We numerically assess the effectiveness of the proposed algorithms through numerical experiments on both synthetic datasets and the real-world MovieLens dataset. To the best of our knowledge, this is the first work on bandit online clustering that allows arms with different means in a cluster and $K$ greater than 2.
Exponentially Consistent Nonparametric Clustering of Data Streams
Nov 21, 2024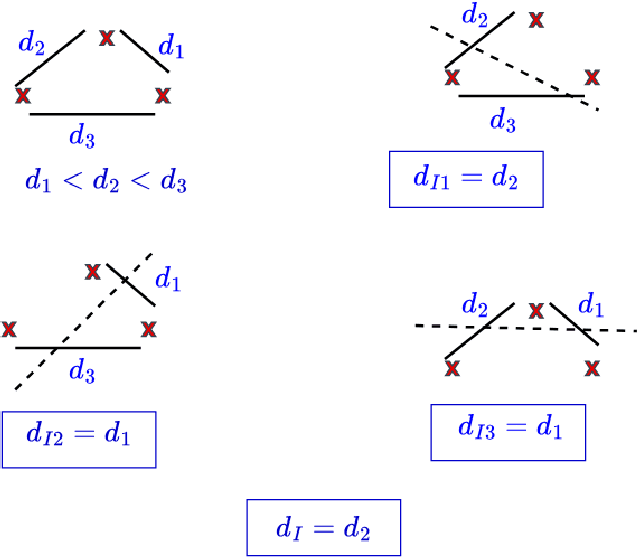
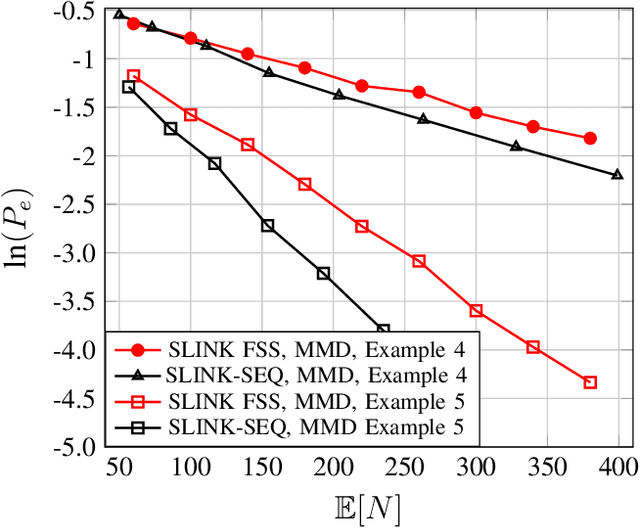
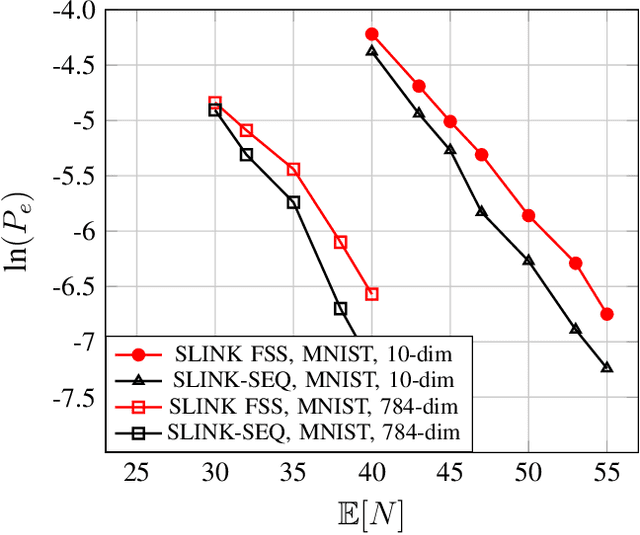
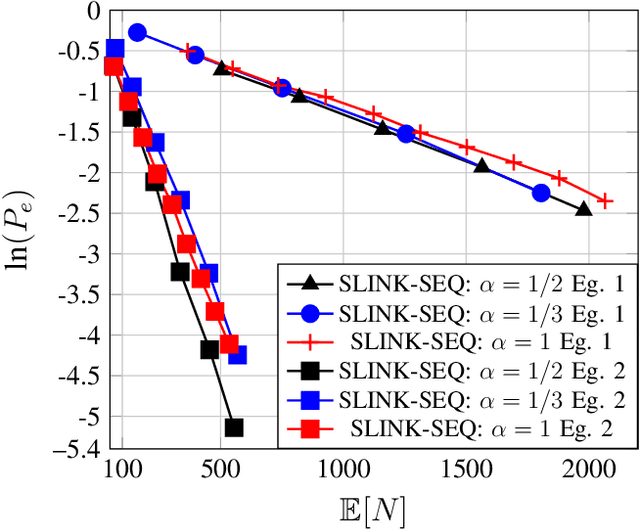
In this paper, we consider nonparametric clustering of $M$ independent and identically distributed (i.i.d.) data streams generated from unknown distributions. The distributions of the $M$ data streams belong to $K$ underlying distribution clusters. Existing results on exponentially consistent nonparametric clustering algorithms, like single linkage-based (SLINK) clustering and $k$-medoids distribution clustering, assume that the maximum intra-cluster distance ($d_L$) is smaller than the minimum inter-cluster distance ($d_H$). First, in the fixed sample size (FSS) setting, we show that exponential consistency can be achieved for SLINK clustering under a less strict assumption, $d_I < d_H$, where $d_I$ is the maximum distance between any two sub-clusters of a cluster that partition the cluster. Note that $d_I < d_L$ in general. Our results show that SLINK is exponentially consistent for a larger class of problems than $k$-medoids distribution clustering. We also identify examples where $k$-medoids clustering is unable to find the true clusters, but SLINK is exponentially consistent. Then, we propose a sequential clustering algorithm, named SLINK-SEQ, based on SLINK and prove that it is also exponentially consistent. Simulation results show that the SLINK-SEQ algorithm requires fewer expected number of samples than the FSS SLINK algorithm for the same probability of error.
Simultaneous Communication and Tracking using Fused Bistatic Measurements
Nov 20, 2024In this paper, we propose a bistatic sensing-assisted beam tracking method for simultaneous communication and tracking of user vehicles navigating arbitrary-shaped road trajectories. Prior work on simultaneous communication and tracking assumes a colocated radar receiver at the transmitter for sensing measurements using the reflected Integrated Sensing and Communication (ISAC) signals in the mmWave band. Full isolation between transmitter and receiver is required here to avoid self-interference. We consider the bistatic setting where the sensing receivers are not colocated and can be realized in practice using traditional half-duplex transmit or receive nodes. First, we process the echoes reflected from the vehicle at multiple multi-antenna nodes at various locations, facilitating estimation of the vehicle's current position. Then, we propose selection criteria for the estimates and a maximum likelihood (ML) fusion scheme to fuse these selected estimates based on the estimated error covariance matrices of these measurements. This fusion scheme is important in bistatic and multistatic settings as the localization error depends significantly on the geometry of the transmitter, target, and receiver locations. Finally, we predict the vehicle's next location using a simple kinematic equation-based model. Through extensive simulation, we study the average spectral efficiency of communication with a moving user using the proposed simultaneous communication and tracking scheme. The proposed fusion-based scheme achieves almost the same average spectral efficiency as an ideal scheme that knows the exact trajectory. We also show that the proposed scheme can be easily extended to systems with Hybrid Digital-Analog architectures and performs similarly even in these systems.
Sequential Controlled Sensing for Composite Multihypothesis Testing
Oct 24, 2019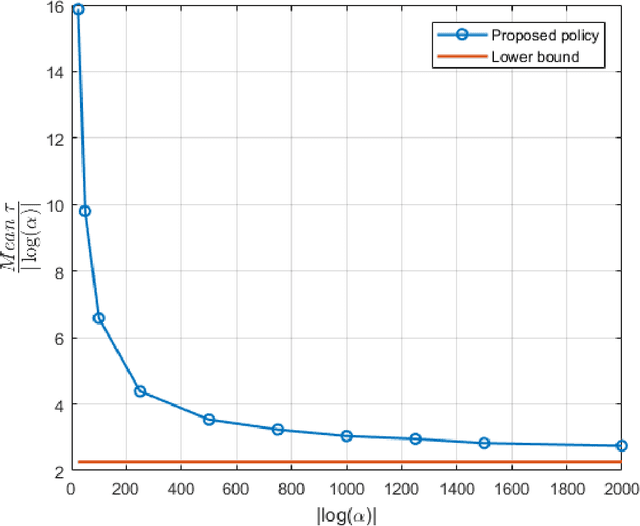
The problem of multi-hypothesis testing with controlled sensing of observations is considered. The distribution of observations collected under each control is assumed to follow a single-parameter exponential family distribution. The goal is to design a policy to find the true hypothesis with minimum expected delay while ensuring that the probability of error is below a given constraint. The decision-maker can control the delay by intelligently choosing the control for observation collection in each time slot. We derive a policy that satisfies the given constraint on the error probability. We also show that the policy is asymptotically optimal in the sense that it asymptotically achieves an information-theoretic lower bound on the expected delay.