Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign, Analysis & Prototyping of a Semi-Automated Staircase-Climbing Rehabilitation Robot
Sep 21, 2018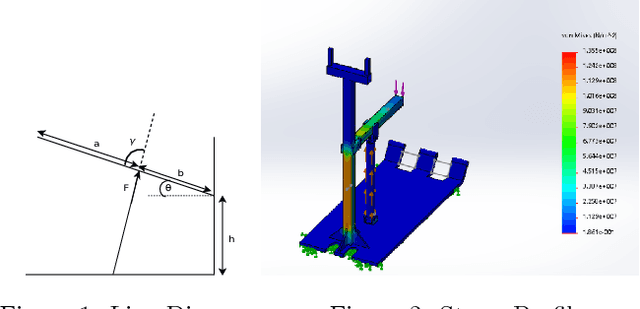
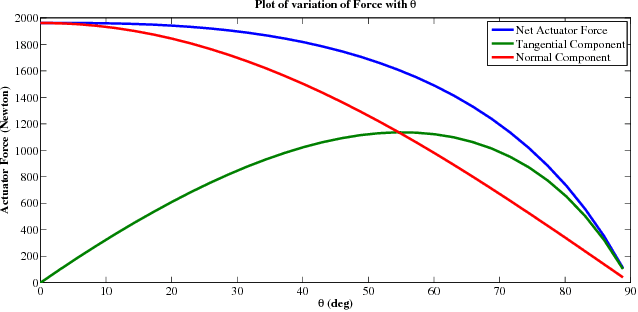
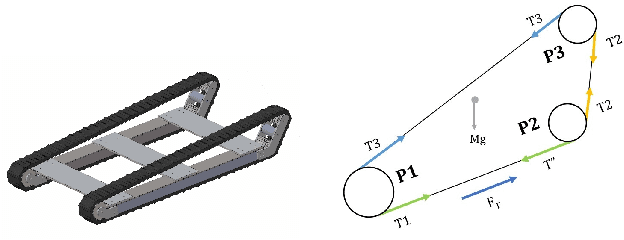
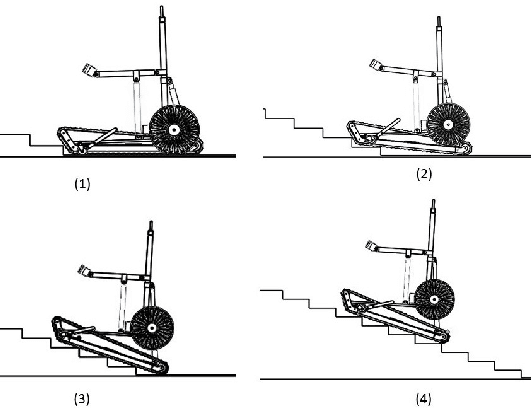
In this paper, we describe the mechanical design, system overview, integration and control techniques associated with SKALA, a unique large-sized robot for carrying a person with physical disabilities, up and down staircases. As a regular wheelchair is unable to perform such a maneuver, the system functions as a non-conventional wheelchair with several intelligent features. We describe the unique mechanical design and the design choices associated with it. We showcase the embedded control architecture that allows for several different modes of teleoperation, all of which have been described in detail. We further investigate the architecture associated with the autonomous operation of the system.
Via