 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetection of out-of-distribution samples using binary neuron activation patterns
Dec 29, 2022Deep neural networks (DNN) have outstanding performance in various applications. Despite numerous efforts of the research community, out-of-distribution (OOD) samples remain significant limitation of DNN classifiers. The ability to identify previously unseen inputs as novel is crucial in safety-critical applications such as self-driving cars, unmanned aerial vehicles and robots. Existing approaches to detect OOD samples treat a DNN as a black box and assess the confidence score of the output predictions. Unfortunately, this method frequently fails, because DNN are not trained to reduce their confidence for OOD inputs. In this work, we introduce a novel method for OOD detection. Our method is motivated by theoretical analysis of neuron activation patterns (NAP) in ReLU based architectures. The proposed method does not introduce high computational workload due to the binary representation of the activation patterns extracted from convolutional layers. The extensive empirical evaluation proves its high performance on various DNN architectures and seven image datasets. ion.
Combating noisy labels in object detection datasets
Nov 25, 2022



The quality of training datasets for deep neural networks is a key factor contributing to the accuracy of resulting models. This is even more important in difficult tasks such as object detection. Dealing with errors in these datasets was in the past limited to accepting that some fraction of examples is incorrect or predicting their confidence and assigning appropriate weights during training. In this work, we propose a different approach. For the first time, we extended the confident learning algorithm to the object detection task. By focusing on finding incorrect labels in the original training datasets, we can eliminate erroneous examples in their root. Suspicious bounding boxes can be re-annotated in order to improve the quality of the dataset itself, thus leading to better models without complicating their already complex architectures. We can effectively point out 99\% of artificially disturbed bounding boxes with FPR below 0.3. We see this method as a promising path to correcting well-known object detection datasets.
Modelling the Point Spread Function of Wide Field Small Aperture Telescopes With Deep Neural Networks -- Applications in Point Spread Function Estimation
Nov 20, 2020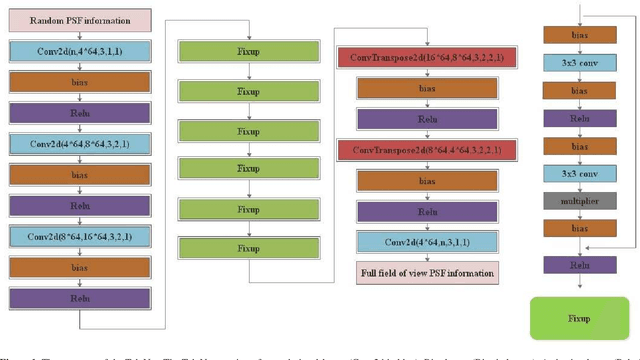

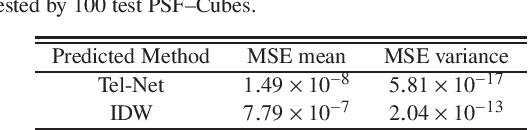
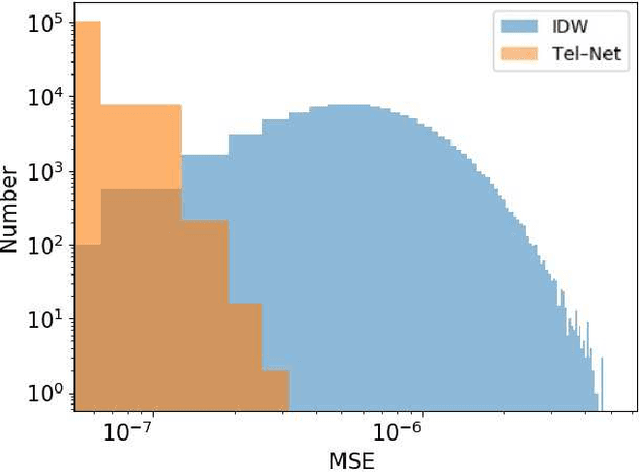
The point spread function (PSF) reflects states of a telescope and plays an important role in development of smart data processing methods. However, for wide field small aperture telescopes (WFSATs), estimating PSF in any position of the whole field of view (FoV) is hard, because aberrations induced by the optical system are quite complex and the signal to noise ratio of star images is often too low for PSF estimation. In this paper, we further develop our deep neural network (DNN) based PSF modelling method and show its applications in PSF estimation. During the telescope alignment and testing stage, our method collects system calibration data through modification of optical elements within engineering tolerances (tilting and decentering). Then we use these data to train a DNN. After training, the DNN can estimate PSF in any field of view from several discretely sampled star images. We use both simulated and experimental data to test performance of our method. The results show that our method could successfully reconstruct PSFs of WFSATs of any states and in any positions of the FoV. Its results are significantly more precise than results obtained by the compared classic method - Inverse Distance Weight (IDW) interpolation. Our method provides foundations for developing of smart data processing methods for WFSATs in the future.