 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemi-Automated Data Annotation in Multisensor Datasets for Autonomous Vehicle Testing
Dec 31, 2025This report presents the design and implementation of a semi-automated data annotation pipeline developed within the DARTS project, whose goal is to create a large-scale, multimodal dataset of driving scenarios recorded in Polish conditions. Manual annotation of such heterogeneous data is both costly and time-consuming. To address this challenge, the proposed solution adopts a human-in-the-loop approach that combines artificial intelligence with human expertise to reduce annotation cost and duration. The system automatically generates initial annotations, enables iterative model retraining, and incorporates data anonymization and domain adaptation techniques. At its core, the tool relies on 3D object detection algorithms to produce preliminary annotations. Overall, the developed tools and methodology result in substantial time savings while ensuring consistent, high-quality annotations across different sensor modalities. The solution directly supports the DARTS project by accelerating the preparation of large annotated dataset in the project's standardized format, strengthening the technological base for autonomous vehicle research in Poland.
Semi-Supervised Diversity-Aware Domain Adaptation for 3D Object detection
Dec 31, 20253D object detectors are fundamental components of perception systems in autonomous vehicles. While these detectors achieve remarkable performance on standard autonomous driving benchmarks, they often struggle to generalize across different domains - for instance, a model trained in the U.S. may perform poorly in regions like Asia or Europe. This paper presents a novel lidar domain adaptation method based on neuron activation patterns, demonstrating that state-of-the-art performance can be achieved by annotating only a small, representative, and diverse subset of samples from the target domain if they are correctly selected. The proposed approach requires very small annotation budget and, when combined with post-training techniques inspired by continual learning prevent weight drift from the original model. Empirical evaluation shows that the proposed domain adaptation approach outperforms both linear probing and state-of-the-art domain adaptation techniques.
ROS-related Robotic Systems Development with V-model-based Application of MeROS Metamodel
Jun 10, 2025As robotic systems grow increasingly complex, heterogeneous, and safety-critical, the need for structured development methodologies becomes paramount. Although frameworks like the Robot Operating System (ROS) and Model-Based Systems Engineering (MBSE) offer foundational tools, they often lack integration when used together. This paper addresses that gap by aligning the widely recognized V-model development paradigm with the MeROS metamodel SysML-based modeling language tailored for ROS-based systems. We propose a domain-specific methodology that bridges ROS-centric modelling with systems engineering practices. Our approach formalises the structure, behaviour, and validation processes of robotic systems using MeROS, while extending it with a generalized, adaptable V-model compatible with both ROS and ROS 2. Rather than prescribing a fixed procedure, the approach supports project-specific flexibility and reuse, offering guidance across all stages of development. The approach is validated through a comprehensive case study on HeROS, a heterogeneous multi-robot platform comprising manipulators, mobile units, and dynamic test environments. This example illustrates how the MeROS-compatible V-model enhances traceability and system consistency while remaining accessible and extensible for future adaptation. The work contributes a structured, tool-agnostic foundation for developers and researchers seeking to apply MBSE practices in ROS-based projects.
Detecting Out-of-distribution Objects Using Neuron Activation Patterns
Jul 31, 2023Object detection is essential to many perception algorithms used in modern robotics applications. Unfortunately, the existing models share a tendency to assign high confidence scores for out-of-distribution (OOD) samples. Although OOD detection has been extensively studied in recent years by the computer vision (CV) community, most proposed solutions apply only to the image recognition task. Real-world applications such as perception in autonomous vehicles struggle with far more complex challenges than classification. In our work, we focus on the prevalent field of object detection, introducing Neuron Activation PaTteRns for out-of-distribution samples detection in Object detectioN (NAPTRON). Performed experiments show that our approach outperforms state-of-the-art methods, without the need to affect in-distribution (ID) performance. By evaluating the methods in two distinct OOD scenarios and three types of object detectors we have created the largest open-source benchmark for OOD object detection.
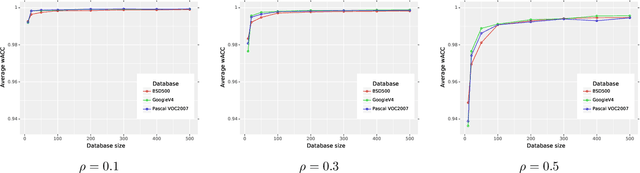
Detection of out-of-distribution samples using binary neuron activation patterns
Dec 29, 2022Deep neural networks (DNN) have outstanding performance in various applications. Despite numerous efforts of the research community, out-of-distribution (OOD) samples remain significant limitation of DNN classifiers. The ability to identify previously unseen inputs as novel is crucial in safety-critical applications such as self-driving cars, unmanned aerial vehicles and robots. Existing approaches to detect OOD samples treat a DNN as a black box and assess the confidence score of the output predictions. Unfortunately, this method frequently fails, because DNN are not trained to reduce their confidence for OOD inputs. In this work, we introduce a novel method for OOD detection. Our method is motivated by theoretical analysis of neuron activation patterns (NAP) in ReLU based architectures. The proposed method does not introduce high computational workload due to the binary representation of the activation patterns extracted from convolutional layers. The extensive empirical evaluation proves its high performance on various DNN architectures and seven image datasets. ion.
Combating noisy labels in object detection datasets
Nov 25, 2022



The quality of training datasets for deep neural networks is a key factor contributing to the accuracy of resulting models. This is even more important in difficult tasks such as object detection. Dealing with errors in these datasets was in the past limited to accepting that some fraction of examples is incorrect or predicting their confidence and assigning appropriate weights during training. In this work, we propose a different approach. For the first time, we extended the confident learning algorithm to the object detection task. By focusing on finding incorrect labels in the original training datasets, we can eliminate erroneous examples in their root. Suspicious bounding boxes can be re-annotated in order to improve the quality of the dataset itself, thus leading to better models without complicating their already complex architectures. We can effectively point out 99\% of artificially disturbed bounding boxes with FPR below 0.3. We see this method as a promising path to correcting well-known object detection datasets.
Deep Learning based Switching Filter for Impulsive Noise Removal in Color Images
Dec 03, 2019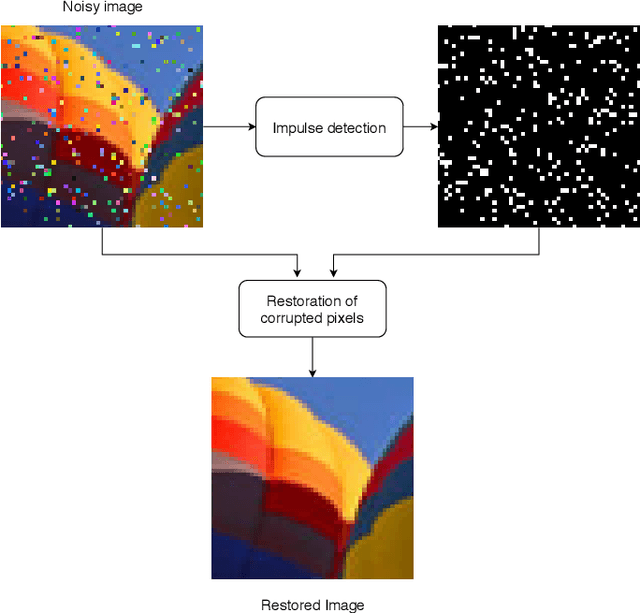

Noise reduction is one the most important and still active research topic in low-level image processing due to its high impact on object detection and scene understanding for computer vision systems. Recently, we can observe a substantial increase of interest in the application of deep learning algorithms in many computer vision problems due to its impressive capability of automatic feature extraction and classification. These methods have been also successfully applied in image denoising, significantly improving the performance, but most of the proposed approaches were designed for Gaussian noise suppression. In this paper, we present a switching filtering design intended for impulsive noise removal using deep learning. In the proposed method, the impulses are identified using a novel deep neural network architecture and noisy pixels are restored using the fast adaptive mean filter. The performed experiments show that the proposed approach is superior to the state-of-the-art filters designed for impulsive noise removal in digital color images.
Organization of ML-based product development as per ISO 26262
Oct 07, 2019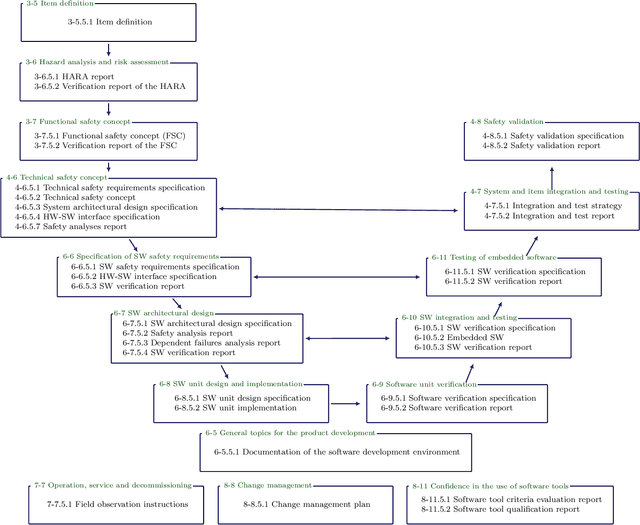
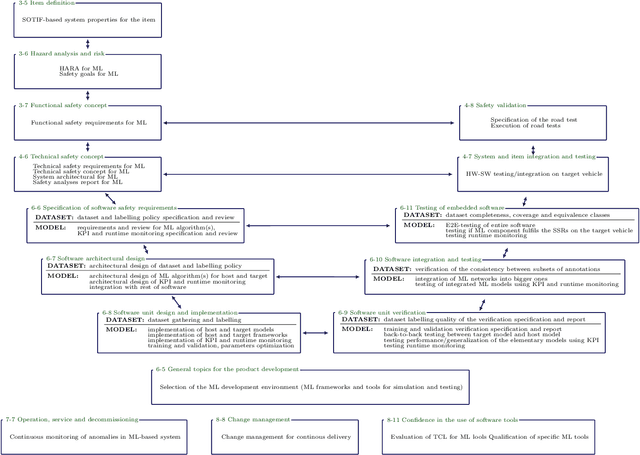
Machine learning (ML) applications generate a continuous stream of success stories from various domains. ML enables many novel applications, also in a safety-related context. With the advent of Autonomous Driving, ML gets used in automotive domain. In such a context, ML-based systems are safety-related. In the automotive industry, the applicable functional safety standard is ISO 26262, which it does not cover specific aspects of ML. In a safety-related ML project, all ISO 26262 work products are typically necessary and have to be delivered. However, specific aspects of ML (like data set requirements, special analyses for ML) must be addressed within some work products. In this paper, we propose how the organization of a ML project could be done according to ISO 26262 phases, sub-phases and work-products.