 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge$π^{*}_{0.6}$: a VLA That Learns From Experience
Nov 19, 2025We study how vision-language-action (VLA) models can improve through real-world deployments via reinforcement learning (RL). We present a general-purpose method, RL with Experience and Corrections via Advantage-conditioned Policies (RECAP), that provides for RL training of VLAs via advantage conditioning. Our method incorporates heterogeneous data into the self-improvement process, including demonstrations, data from on-policy collection, and expert teleoperated interventions provided during autonomous execution. RECAP starts by pre-training a generalist VLA with offline RL, which we call $π^{*}_{0.6}$, that can then be specialized to attain high performance on downstream tasks through on-robot data collection. We show that the $π^{*}_{0.6}$ model trained with the full RECAP method can fold laundry in real homes, reliably assemble boxes, and make espresso drinks using a professional espresso machine. On some of the hardest tasks, RECAP more than doubles task throughput and roughly halves the task failure rate.
$π_{0.5}$: a Vision-Language-Action Model with Open-World Generalization
Apr 22, 2025



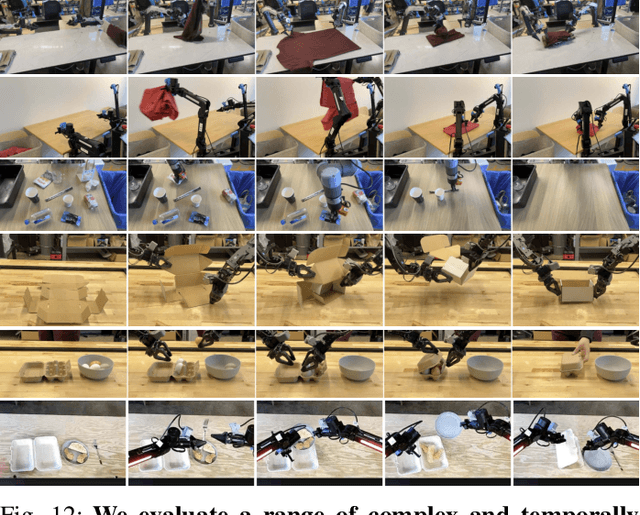
In order for robots to be useful, they must perform practically relevant tasks in the real world, outside of the lab. While vision-language-action (VLA) models have demonstrated impressive results for end-to-end robot control, it remains an open question how far such models can generalize in the wild. We describe $\pi_{0.5}$, a new model based on $\pi_{0}$ that uses co-training on heterogeneous tasks to enable broad generalization. $\pi_{0.5}$\ uses data from multiple robots, high-level semantic prediction, web data, and other sources to enable broadly generalizable real-world robotic manipulation. Our system uses a combination of co-training and hybrid multi-modal examples that combine image observations, language commands, object detections, semantic subtask prediction, and low-level actions. Our experiments show that this kind of knowledge transfer is essential for effective generalization, and we demonstrate for the first time that an end-to-end learning-enabled robotic system can perform long-horizon and dexterous manipulation skills, such as cleaning a kitchen or bedroom, in entirely new homes.
$π_0$: A Vision-Language-Action Flow Model for General Robot Control
Oct 31, 2024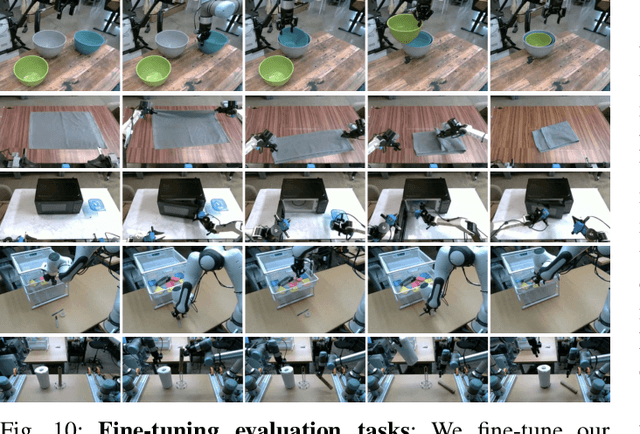
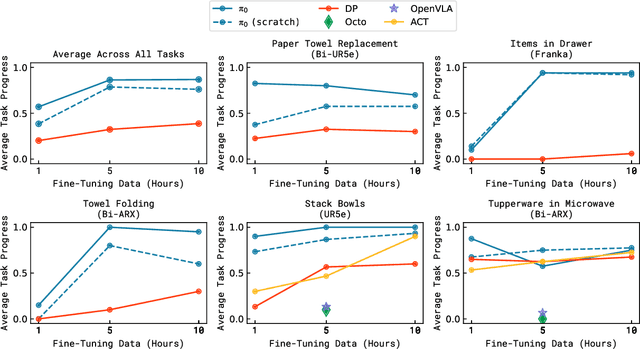
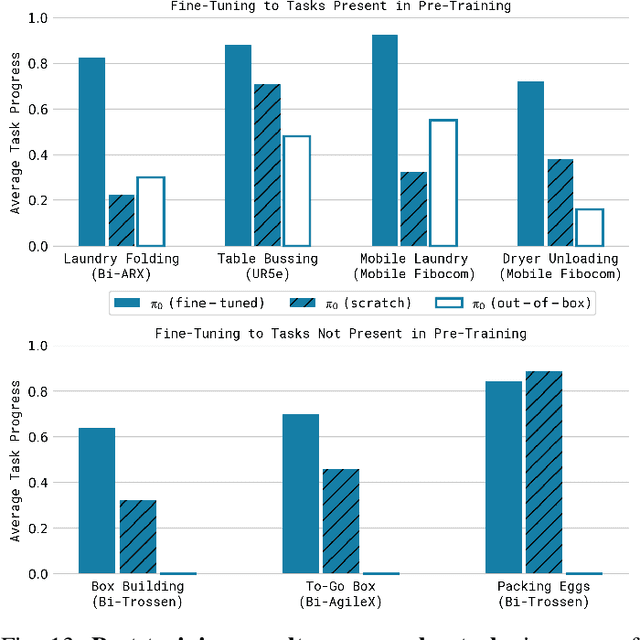
Robot learning holds tremendous promise to unlock the full potential of flexible, general, and dexterous robot systems, as well as to address some of the deepest questions in artificial intelligence. However, bringing robot learning to the level of generality required for effective real-world systems faces major obstacles in terms of data, generalization, and robustness. In this paper, we discuss how generalist robot policies (i.e., robot foundation models) can address these challenges, and how we can design effective generalist robot policies for complex and highly dexterous tasks. We propose a novel flow matching architecture built on top of a pre-trained vision-language model (VLM) to inherit Internet-scale semantic knowledge. We then discuss how this model can be trained on a large and diverse dataset from multiple dexterous robot platforms, including single-arm robots, dual-arm robots, and mobile manipulators. We evaluate our model in terms of its ability to perform tasks in zero shot after pre-training, follow language instructions from people and from a high-level VLM policy, and its ability to acquire new skills via fine-tuning. Our results cover a wide variety of tasks, such as laundry folding, table cleaning, and assembling boxes.
Organization of ML-based product development as per ISO 26262
Oct 07, 2019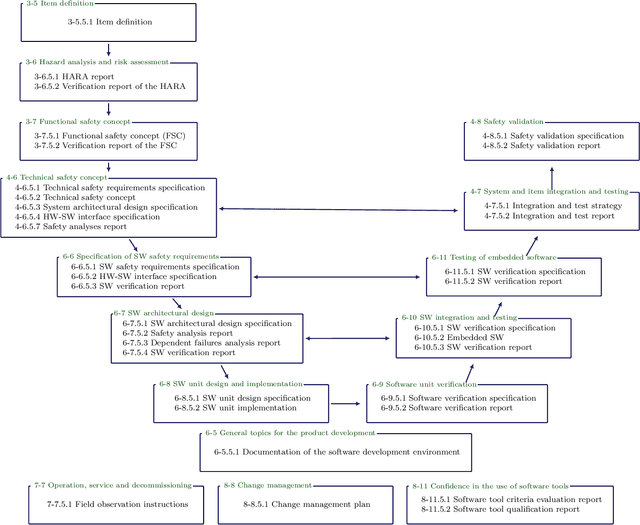
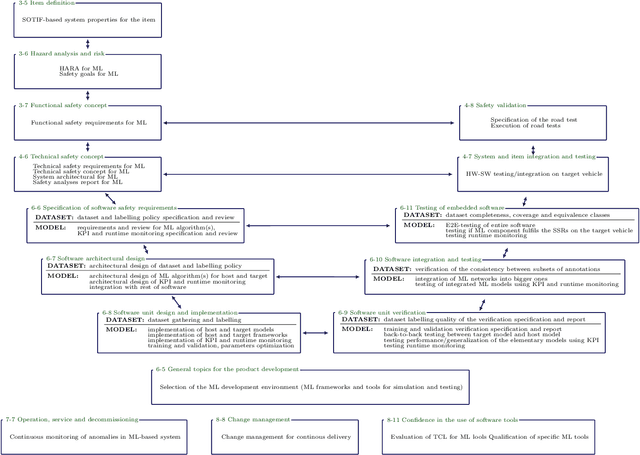
Machine learning (ML) applications generate a continuous stream of success stories from various domains. ML enables many novel applications, also in a safety-related context. With the advent of Autonomous Driving, ML gets used in automotive domain. In such a context, ML-based systems are safety-related. In the automotive industry, the applicable functional safety standard is ISO 26262, which it does not cover specific aspects of ML. In a safety-related ML project, all ISO 26262 work products are typically necessary and have to be delivered. However, specific aspects of ML (like data set requirements, special analyses for ML) must be addressed within some work products. In this paper, we propose how the organization of a ML project could be done according to ISO 26262 phases, sub-phases and work-products.