 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInvestigating the Effect of Sensor Modalities in Multi-Sensor Detection-Prediction Models
Jan 09, 2021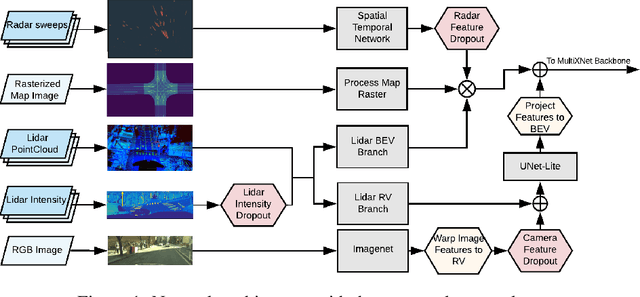
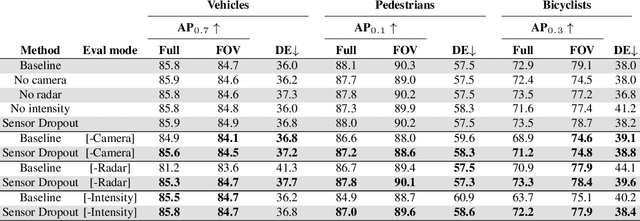
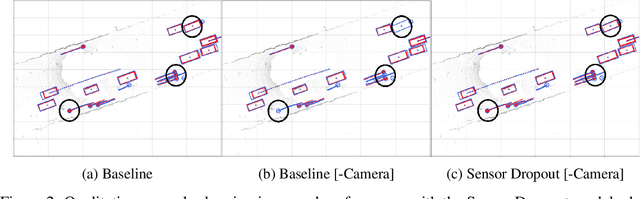
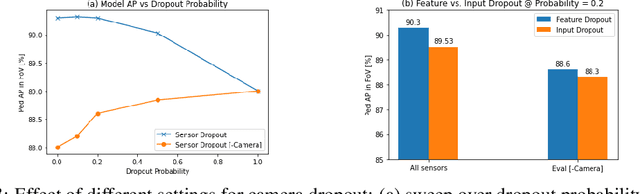
Detection of surrounding objects and their motion prediction are critical components of a self-driving system. Recently proposed models that jointly address these tasks rely on a number of sensors to achieve state-of-the-art performance. However, this increases system complexity and may result in a brittle model that overfits to any single sensor modality while ignoring others, leading to reduced generalization. We focus on this important problem and analyze the contribution of sensor modalities towards the model performance. In addition, we investigate the use of sensor dropout to mitigate the above-mentioned issues, leading to a more robust, better-performing model on real-world driving data.
Neural-Guided Deductive Search for Real-Time Program Synthesis from Examples
Sep 09, 2018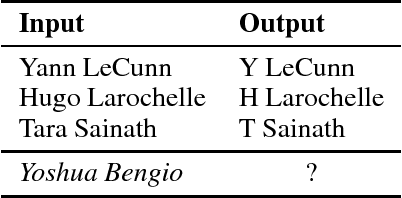

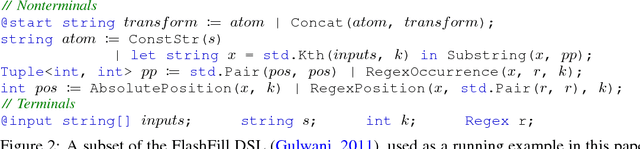
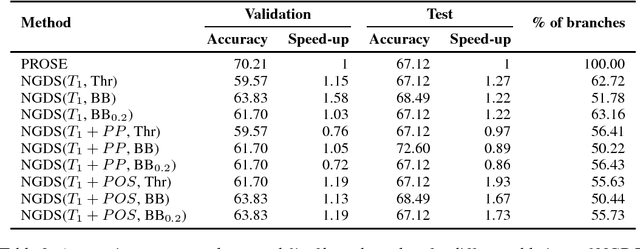
Synthesizing user-intended programs from a small number of input-output examples is a challenging problem with several important applications like spreadsheet manipulation, data wrangling and code refactoring. Existing synthesis systems either completely rely on deductive logic techniques that are extensively hand-engineered or on purely statistical models that need massive amounts of data, and in general fail to provide real-time synthesis on challenging benchmarks. In this work, we propose Neural Guided Deductive Search (NGDS), a hybrid synthesis technique that combines the best of both symbolic logic techniques and statistical models. Thus, it produces programs that satisfy the provided specifications by construction and generalize well on unseen examples, similar to data-driven systems. Our technique effectively utilizes the deductive search framework to reduce the learning problem of the neural component to a simple supervised learning setup. Further, this allows us to both train on sparingly available real-world data and still leverage powerful recurrent neural network encoders. We demonstrate the effectiveness of our method by evaluating on real-world customer scenarios by synthesizing accurate programs with up to 12x speed-up compared to state-of-the-art systems.