 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat Went Wrong? Closing the Sim-to-Real Gap via Differentiable Causal Discovery
Paper and Code
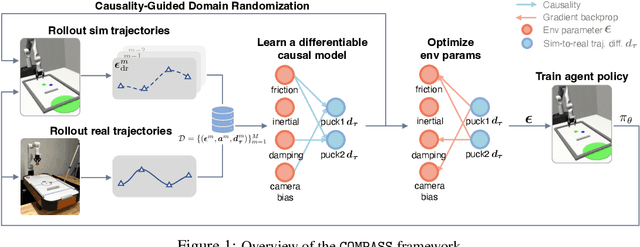


Training control policies in simulation is more appealing than on real robots directly, as it allows for exploring diverse states in a safe and efficient manner. Yet, robot simulators inevitably exhibit disparities from the real world, yielding inaccuracies that manifest as the simulation-to-real gap. Existing literature has proposed to close this gap by actively modifying specific simulator parameters to align the simulated data with real-world observations. However, the set of tunable parameters is usually manually selected to reduce the search space in a case-by-case manner, which is hard to scale up for complex systems and requires extensive domain knowledge. To address the scalability issue and automate the parameter-tuning process, we introduce an approach that aligns the simulator with the real world by discovering the causal relationship between the environment parameters and the sim-to-real gap. Concretely, our method learns a differentiable mapping from the environment parameters to the differences between simulated and real-world robot-object trajectories. This mapping is governed by a simultaneously-learned causal graph to help prune the search space of parameters, provide better interpretability, and improve generalization. We perform experiments to achieve both sim-to-sim and sim-to-real transfer, and show that our method has significant improvements in trajectory alignment and task success rate over strong baselines in a challenging manipulation task.