 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSuperhuman Surgical Peg Transfer Using Depth-Sensing and Deep Recurrent Neural Networks
Paper and Code
Dec 24, 2020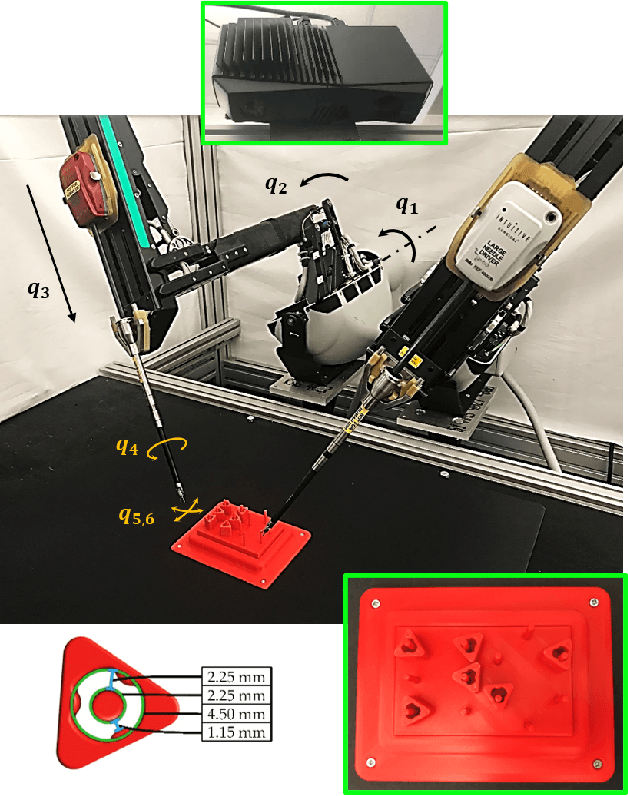
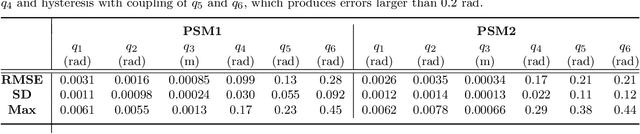
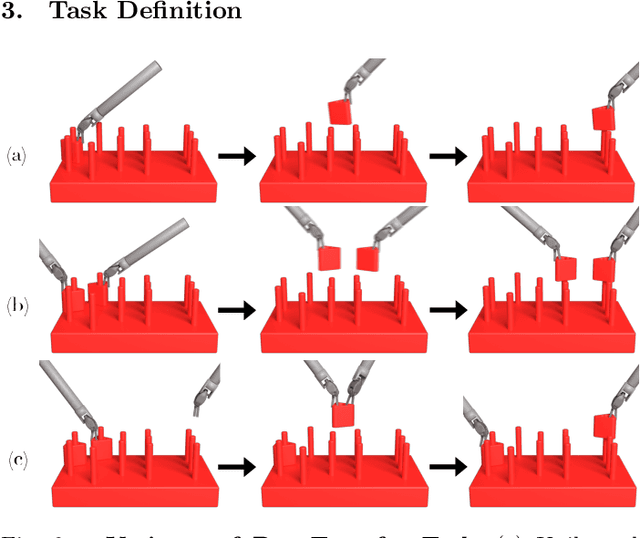
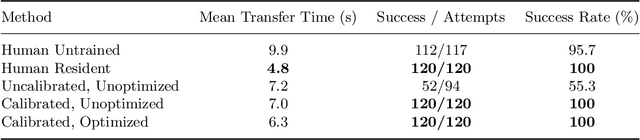
We consider the automation of the well-known peg-transfer task from the Fundamentals of Laparoscopic Surgery (FLS). While human surgeons teleoperate robots to perform this task with great dexterity, it remains challenging to automate. We present an approach that leverages emerging innovations in depth sensing, deep learning, and Peiper's method for computing inverse kinematics with time-minimized joint motion. We use the da Vinci Research Kit (dVRK) surgical robot with a Zivid depth sensor, and automate three variants of the peg-transfer task: unilateral, bilateral without handovers, and bilateral with handovers. We use 3D-printed fiducial markers with depth sensing and a deep recurrent neural network to improve the precision of the dVRK to less than 1 mm. We report experimental results for 1800 block transfer trials. Results suggest that the fully automated system can outperform an experienced human surgical resident, who performs far better than untrained humans, in terms of both speed and success rate. For the most difficult variant of peg transfer (with handovers) we compare the performance of the surgical resident with performance of the automated system over 120 trials for each. The experienced surgical resident achieves success rate 93.2 % with mean transfer time of 8.6 seconds. The automated system achieves success rate 94.1 % with mean transfer time of 8.1 seconds. To our knowledge this is the first fully automated system to achieve "superhuman" performance in both speed and success on peg transfer. Supplementary material is available at https://sites.google.com/view/surgicalpegtransfer.