 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoad Traffic Law Adaptive Decision-making for Self-Driving Vehicles
Paper and Code
Apr 26, 2022
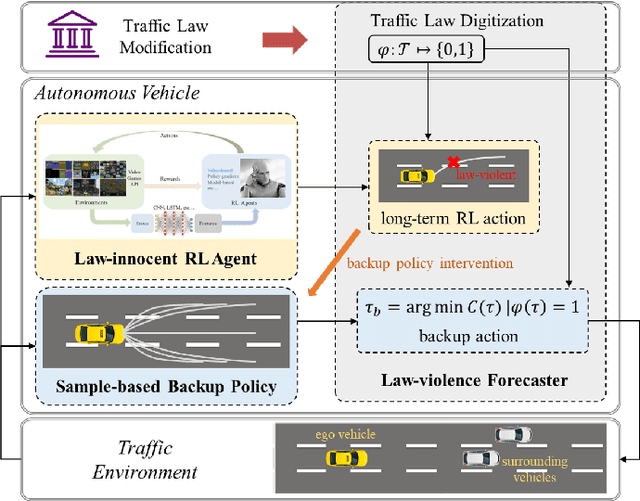
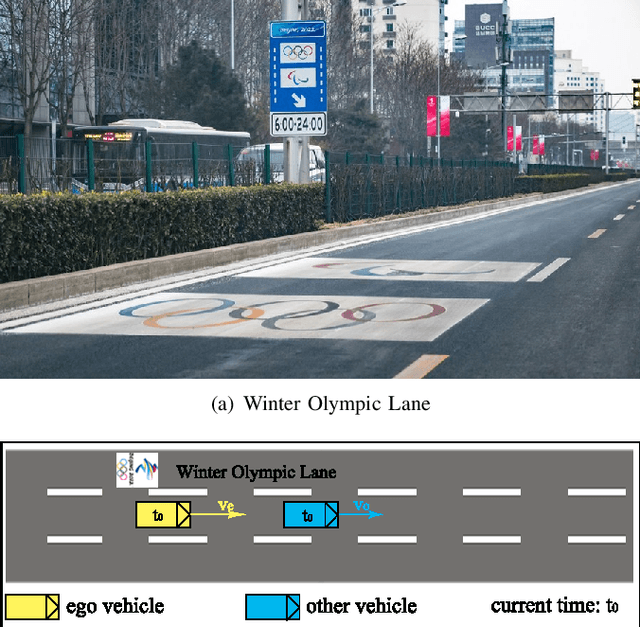
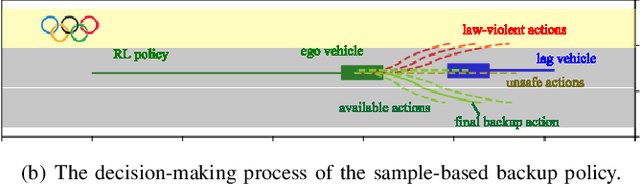
Self-driving vehicles have their own intelligence to drive on open roads. However, vehicle managers, e.g., government or industrial companies, still need a way to tell these self-driving vehicles what behaviors are encouraged or forbidden. Unlike human drivers, current self-driving vehicles cannot understand the traffic laws, thus rely on the programmers manually writing the corresponding principles into the driving systems. It would be less efficient and hard to adapt some temporary traffic laws, especially when the vehicles use data-driven decision-making algorithms. Besides, current self-driving vehicle systems rarely take traffic law modification into consideration. This work aims to design a road traffic law adaptive decision-making method. The decision-making algorithm is designed based on reinforcement learning, in which the traffic rules are usually implicitly coded in deep neural networks. The main idea is to supply the adaptability to traffic laws of self-driving vehicles by a law-adaptive backup policy. In this work, the natural language-based traffic laws are first translated into a logical expression by the Linear Temporal Logic method. Then, the system will try to monitor in advance whether the self-driving vehicle may break the traffic laws by designing a long-term RL action space. Finally, a sample-based planning method will re-plan the trajectory when the vehicle may break the traffic rules. The method is validated in a Beijing Winter Olympic Lane scenario and an overtaking case, built in CARLA simulator. The results show that by adopting this method, the self-driving vehicles can comply with new issued or updated traffic laws effectively. This method helps self-driving vehicles governed by digital traffic laws, which is necessary for the wide adoption of autonomous driving.