 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeManiSkill: Learning-from-Demonstrations Benchmark for Generalizable Manipulation Skills
Paper and Code

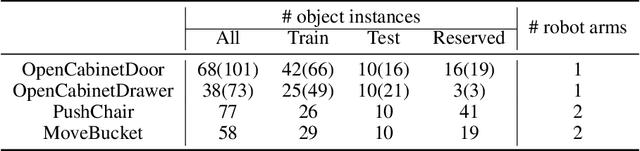
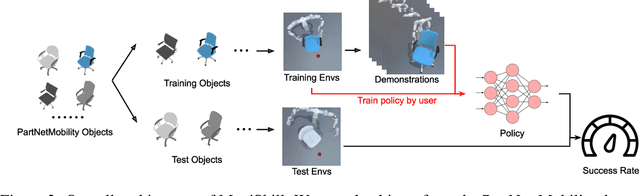

Learning generalizable manipulation skills is central for robots to achieve task automation in environments with endless scene and object variations. However, existing robot learning environments are limited in both scale and diversity of 3D assets (especially of articulated objects), making it difficult to train and evaluate the generalization ability of agents over novel objects. In this work, we focus on object-level generalization and propose SAPIEN Manipulation Skill Benchmark (abbreviated as ManiSkill), a large-scale learning-from-demonstrations benchmark for articulated object manipulation with 3D visual input (point cloud and RGB-D image). ManiSkill supports object-level variations by utilizing a rich and diverse set of articulated objects, and each task is carefully designed for learning manipulations on a single category of objects. We equip ManiSkill with a large number of high-quality demonstrations to facilitate learning-from-demonstrations approaches and perform evaluations on baseline algorithms. We believe that ManiSkill can encourage the robot learning community to explore more on learning generalizable object manipulation skills.