 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLoss Distillation via Gradient Matching for Point Cloud Completion with Weighted Chamfer Distance
Paper and Code
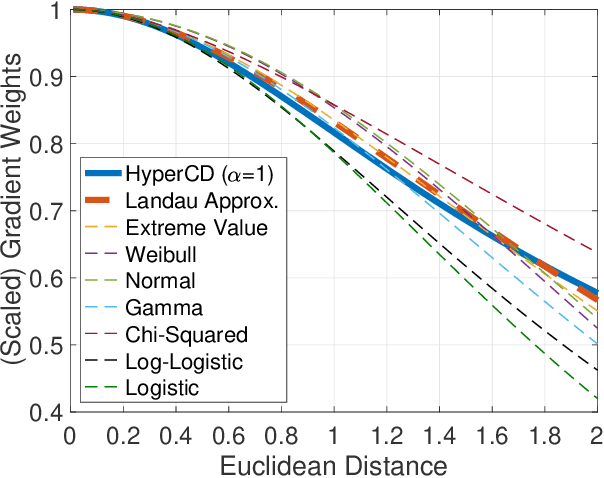
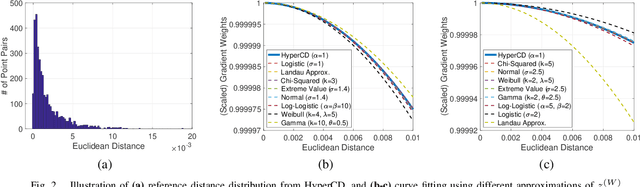
3D point clouds enhanced the robot's ability to perceive the geometrical information of the environments, making it possible for many downstream tasks such as grasp pose detection and scene understanding. The performance of these tasks, though, heavily relies on the quality of data input, as incomplete can lead to poor results and failure cases. Recent training loss functions designed for deep learning-based point cloud completion, such as Chamfer distance (CD) and its variants (\eg HyperCD ), imply a good gradient weighting scheme can significantly boost performance. However, these CD-based loss functions usually require data-related parameter tuning, which can be time-consuming for data-extensive tasks. To address this issue, we aim to find a family of weighted training losses ({\em weighted CD}) that requires no parameter tuning. To this end, we propose a search scheme, {\em Loss Distillation via Gradient Matching}, to find good candidate loss functions by mimicking the learning behavior in backpropagation between HyperCD and weighted CD. Once this is done, we propose a novel bilevel optimization formula to train the backbone network based on the weighted CD loss. We observe that: (1) with proper weighted functions, the weighted CD can always achieve similar performance to HyperCD, and (2) the Landau weighted CD, namely {\em Landau CD}, can outperform HyperCD for point cloud completion and lead to new state-of-the-art results on several benchmark datasets. {\it Our demo code is available at \url{https://github.com/Zhang-VISLab/IROS2024-LossDistillationWeightedCD}.}