 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJRDB: A Dataset and Benchmark for Visual Perception for Navigation in Human Environments
Paper and Code
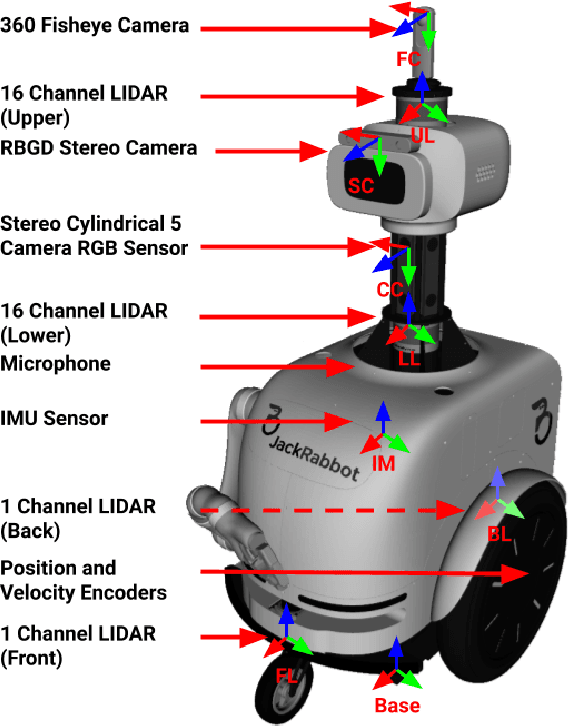
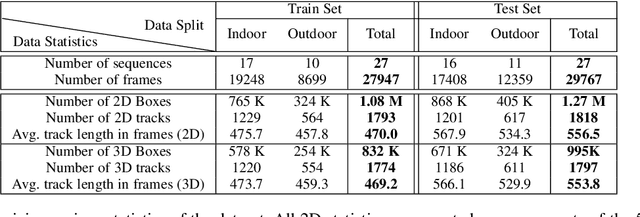
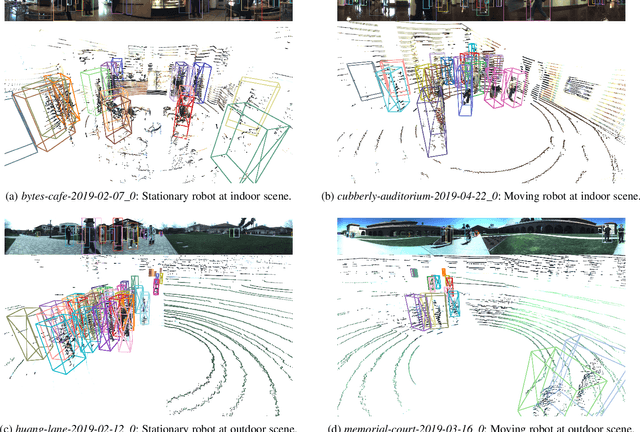
We present JRDB, a novel dataset collected from our social mobile manipulator JackRabbot. The dataset includes 64 minutes of multimodal sensor data including stereo cylindrical 360$^\circ$ RGB video at 15 fps, 3D point clouds from two Velodyne 16 Lidars, line 3D point clouds from two Sick Lidars, audio signal, RGBD video at 30 fps, 360$^\circ$ spherical image from a fisheye camera and encoder values from the robot's wheels. Our dataset includes data from traditionally underrepresented scenes such as indoor environments and pedestrian areas, from both stationary and navigating robot platform. The dataset has been annotated with over 2.3 million bounding boxes spread over 5 individual cameras and 1.8 million associated 3D cuboids around all people in the scenes totalling over 3500 time consistent trajectories. Together with our dataset and the annotations, we launch a benchmark and metrics for 2D and 3D person detection and tracking. With this dataset, that we plan on further annotating in the future, we hope to provide a new source of data and a test-bench for research in the areas of robot autonomous navigation and all perceptual tasks around social robotics in human environments.