 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntermittent Visual Servoing: Efficiently Learning Policies Robust to Instrument Changes for High-precision Surgical Manipulation
Paper and Code
Nov 12, 2020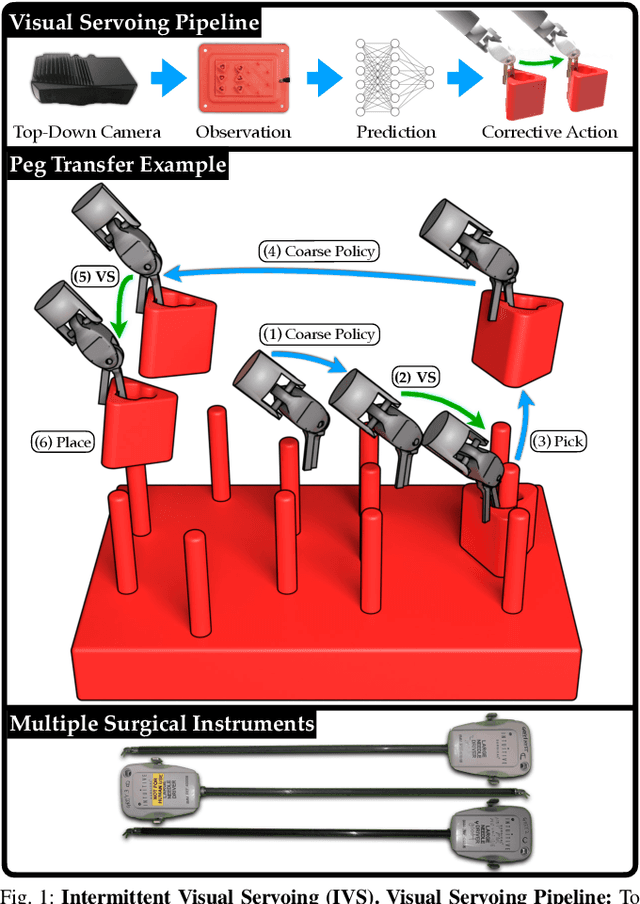
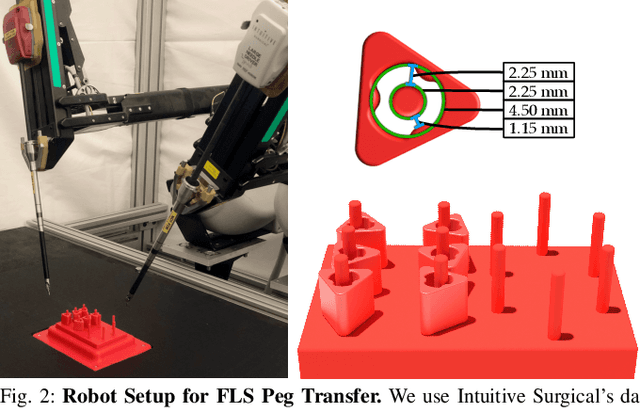
Automation of surgical tasks using cable-driven robots is challenging due to backlash, hysteresis, and cable tension, and these issues are exacerbated as surgical instruments must often be changed during an operation. In this work, we propose a framework for automation of high-precision surgical tasks by learning sample efficient, accurate, closed-loop policies that operate directly on visual feedback instead of robot encoder estimates. This framework, which we call intermittent visual servoing (IVS), intermittently switches to a learned visual servo policy for high-precision segments of repetitive surgical tasks while relying on a coarse open-loop policy for the segments where precision is not necessary. To compensate for cable-related effects, we apply imitation learning to rapidly train a policy that maps images of the workspace and instrument from a top-down RGB camera to small corrective motions. We train the policy using only 180 human demonstrations that are roughly 2 seconds each. Results on a da Vinci Research Kit suggest that combining the coarse policy with half a second of corrections from the learned policy during each high-precision segment improves the success rate on the Fundamentals of Laparoscopic Surgery peg transfer task from 72.9% to 99.2%, 31.3% to 99.2%, and 47.2% to 100.0% for 3 instruments with differing cable-related effects. In the contexts we studied, IVS attains the highest published success rates for automated surgical peg transfer and is significantly more reliable than previous techniques when instruments are changed. Supplementary material is available at https://tinyurl.com/ivs-icra.