 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHomography Guided Temporal Fusion for Road Line and Marking Segmentation
Paper and Code
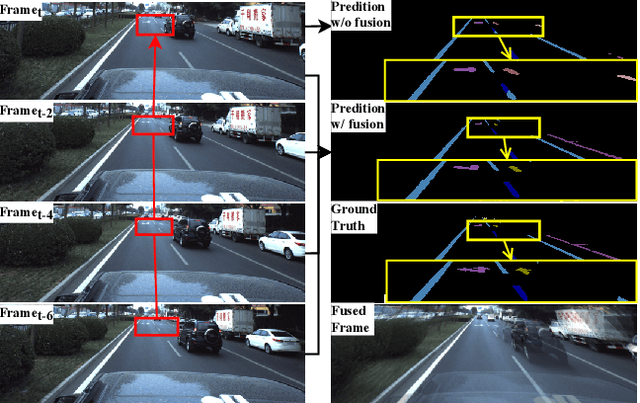
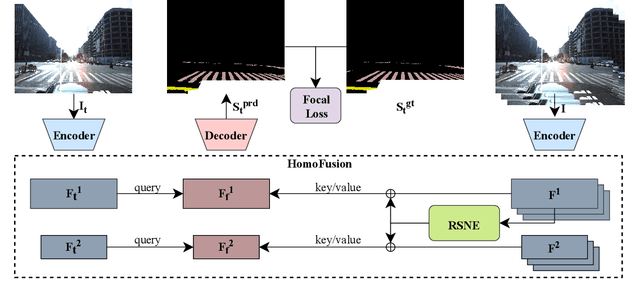
Reliable segmentation of road lines and markings is critical to autonomous driving. Our work is motivated by the observations that road lines and markings are (1) frequently occluded in the presence of moving vehicles, shadow, and glare and (2) highly structured with low intra-class shape variance and overall high appearance consistency. To solve these issues, we propose a Homography Guided Fusion (HomoFusion) module to exploit temporally-adjacent video frames for complementary cues facilitating the correct classification of the partially occluded road lines or markings. To reduce computational complexity, a novel surface normal estimator is proposed to establish spatial correspondences between the sampled frames, allowing the HomoFusion module to perform a pixel-to-pixel attention mechanism in updating the representation of the occluded road lines or markings. Experiments on ApolloScape, a large-scale lane mark segmentation dataset, and ApolloScape Night with artificial simulated night-time road conditions, demonstrate that our method outperforms other existing SOTA lane mark segmentation models with less than 9\% of their parameters and computational complexity. We show that exploiting available camera intrinsic data and ground plane assumption for cross-frame correspondence can lead to a light-weight network with significantly improved performances in speed and accuracy. We also prove the versatility of our HomoFusion approach by applying it to the problem of water puddle segmentation and achieving SOTA performance.