 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFully Onboard AI-powered Human-Drone Pose Estimation on Ultra-low Power Autonomous Flying Nano-UAVs
Paper and Code
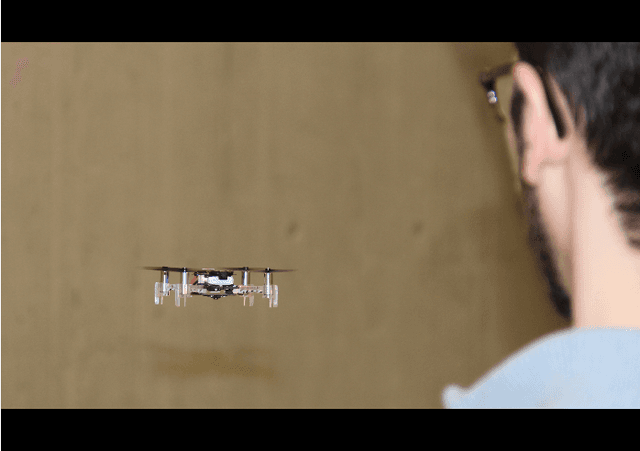
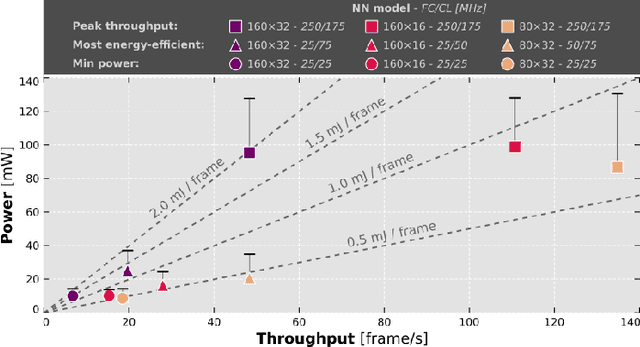
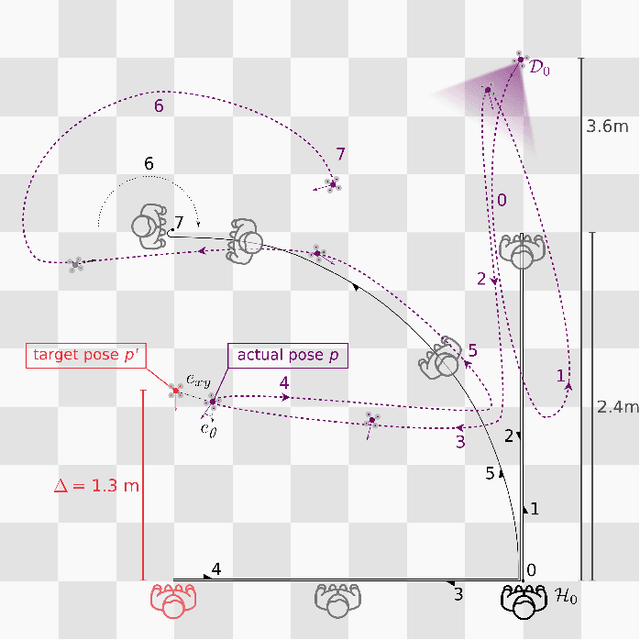
Artificial intelligence-powered pocket-sized air robots have the potential to revolutionize the Internet-of-Things ecosystem, acting as autonomous, unobtrusive, and ubiquitous smart sensors. With a few cm$^{2}$ form-factor, nano-sized unmanned aerial vehicles (UAVs) are the natural befit for indoor human-drone interaction missions, as the pose estimation task we address in this work. However, this scenario is challenged by the nano-UAVs' limited payload and computational power that severely relegates the onboard brain to the sub-100 mW microcontroller unit-class. Our work stands at the intersection of the novel parallel ultra-low-power (PULP) architectural paradigm and our general development methodology for deep neural network (DNN) visual pipelines, i.e., covering from perception to control. Addressing the DNN model design, from training and dataset augmentation to 8-bit quantization and deployment, we demonstrate how a PULP-based processor, aboard a nano-UAV, is sufficient for the real-time execution (up to 135 frame/s) of our novel DNN, called PULP-Frontnet. We showcase how, scaling our model's memory and computational requirement, we can significantly improve the onboard inference (top energy efficiency of 0.43 mJ/frame) with no compromise in the quality-of-result vs. a resource-unconstrained baseline (i.e., full-precision DNN). Field experiments demonstrate a closed-loop top-notch autonomous navigation capability, with a heavily resource-constrained 27-gram Crazyflie 2.1 nano-quadrotor. Compared against the control performance achieved using an ideal sensing setup, onboard relative pose inference yields excellent drone behavior in terms of median absolute errors, such as positional (onboard: 41 cm, ideal: 26 cm) and angular (onboard: 3.7$^{\circ}$, ideal: 4.1$^{\circ}$).