 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Machine Learning to Robotics: Challenges and Opportunities for Embodied Intelligence
Paper and Code
Oct 28, 2021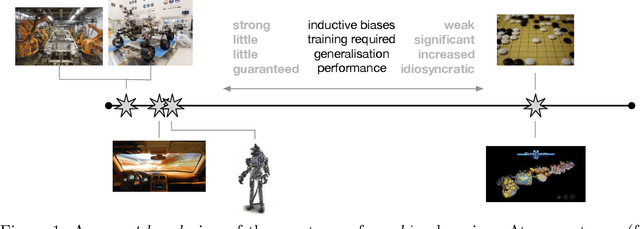
Machine learning has long since become a keystone technology, accelerating science and applications in a broad range of domains. Consequently, the notion of applying learning methods to a particular problem set has become an established and valuable modus operandi to advance a particular field. In this article we argue that such an approach does not straightforwardly extended to robotics -- or to embodied intelligence more generally: systems which engage in a purposeful exchange of energy and information with a physical environment. In particular, the purview of embodied intelligent agents extends significantly beyond the typical considerations of main-stream machine learning approaches, which typically (i) do not consider operation under conditions significantly different from those encountered during training; (ii) do not consider the often substantial, long-lasting and potentially safety-critical nature of interactions during learning and deployment; (iii) do not require ready adaptation to novel tasks while at the same time (iv) effectively and efficiently curating and extending their models of the world through targeted and deliberate actions. In reality, therefore, these limitations result in learning-based systems which suffer from many of the same operational shortcomings as more traditional, engineering-based approaches when deployed on a robot outside a well defined, and often narrow operating envelope. Contrary to viewing embodied intelligence as another application domain for machine learning, here we argue that it is in fact a key driver for the advancement of machine learning technology. In this article our goal is to highlight challenges and opportunities that are specific to embodied intelligence and to propose research directions which may significantly advance the state-of-the-art in robot learning.