 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficiently Calibrating Cable-Driven Surgical Robots With RGBD Sensing, Temporal Windowing, and Linear and Recurrent Neural Network Compensation
Paper and Code
Mar 19, 2020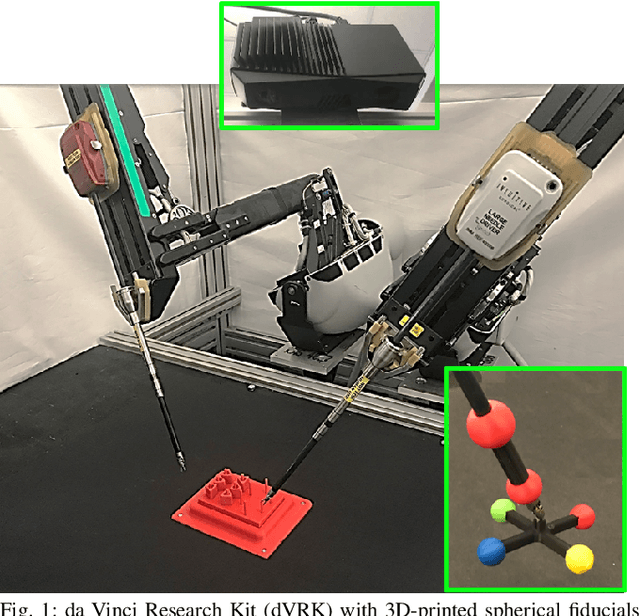
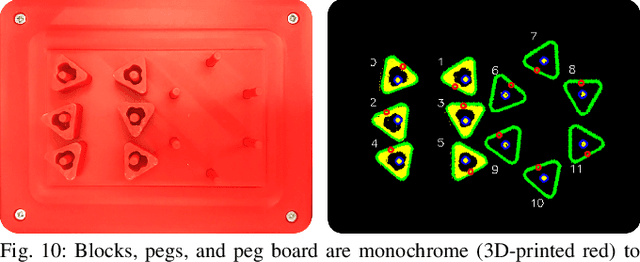
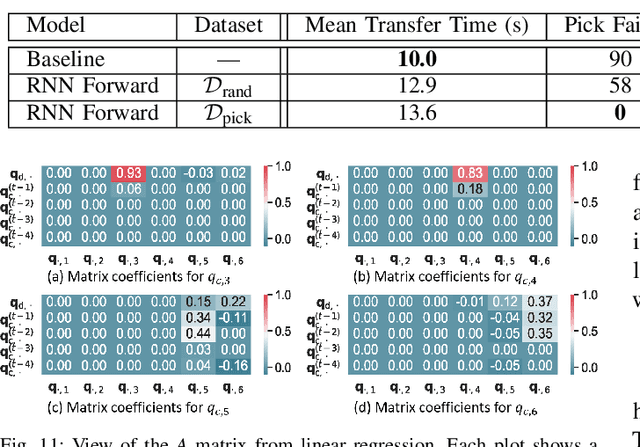
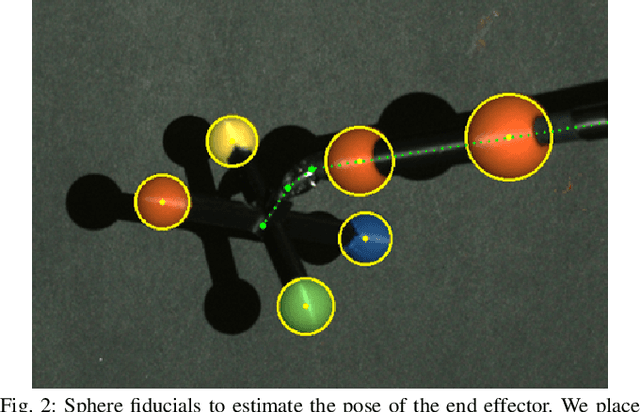
Automation of surgical subtasks using cable-driven robotic surgical assistants (RSAs) such as Intuitive Surgical's da Vinci Research Kit (dVRK) is challenging due to imprecision in control from cable-related effects such as backlash, stretch, and hysteresis. We propose a novel approach to efficiently calibrate a dVRK by placing a 3D printed fiducial coordinate frame on the arm and end-effector that is tracked using RGBD sensing. To measure the coupling effects between joints and history-dependent effects, we analyze data from sampled trajectories and consider 13 modeling approaches using LSTM recurrent neural networks and linear models with varying temporal window length to provide corrective feedback. With the proposed method, data collection takes 31 minutes to produce 1800 samples and model training takes less than a minute. Results suggest that the resulting model can reduce the mean tracking error of the physical robot from 2.96mm to 0.65mm on a test set of reference trajectories. We evaluate the model by executing open-loop trajectories of the FLS peg transfer surgeon training task. Results suggest that the best approach increases success rate from 39.4% to 96.7% comparable to the performance of an expert surgical resident. Supplementary material, including 3D-printable models, is available at https://sites.google.com/berkeley.edu/surgical-calibration.