Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDexYCB: A Benchmark for Capturing Hand Grasping of Objects
Paper and Code
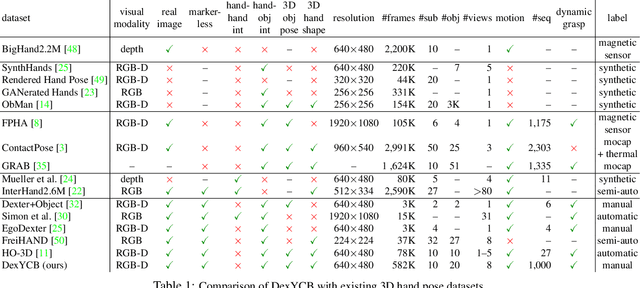
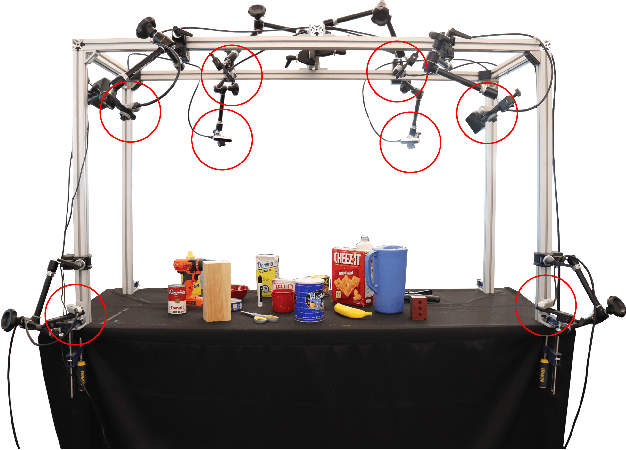
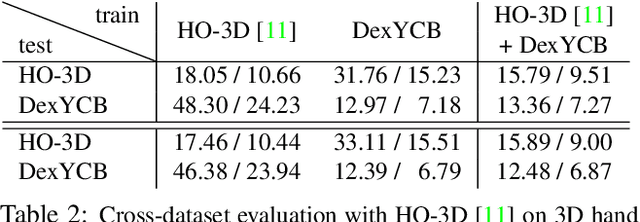

We introduce DexYCB, a new dataset for capturing hand grasping of objects. We first compare DexYCB with a related one through cross-dataset evaluation. We then present a thorough benchmark of state-of-the-art approaches on three relevant tasks: 2D object and keypoint detection, 6D object pose estimation, and 3D hand pose estimation. Finally, we evaluate a new robotics-relevant task: generating safe robot grasps in human-to-robot object handover. Dataset and code are available at https://dex-ycb.github.io.
* Accepted to CVPR 2021
View paper on