 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollaborative Navigation and Manipulation of a Cable-towed Load by Multiple Quadrupedal Robots
Paper and Code
Jun 29, 2022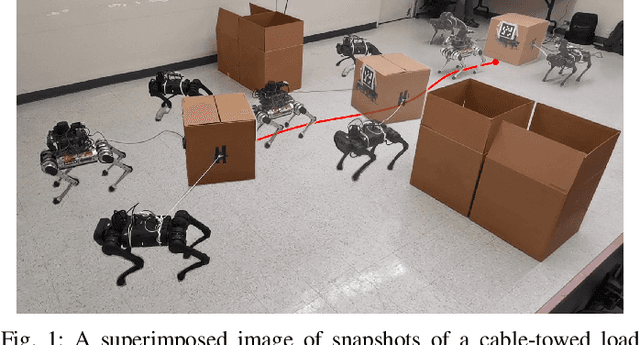
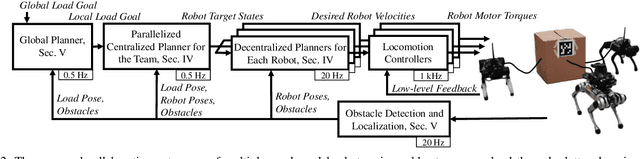
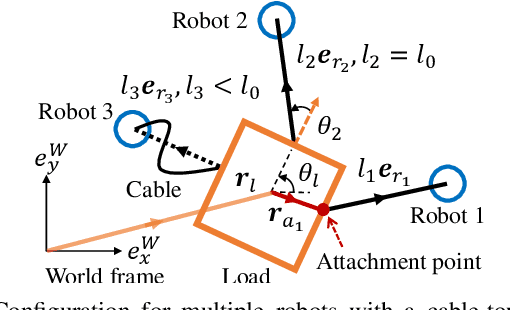
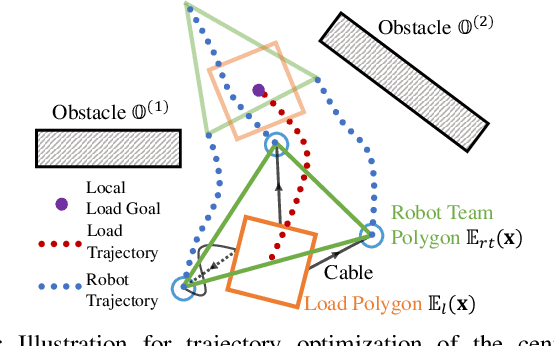
This paper tackles the problem of robots collaboratively towing a load with cables to a specified goal location while avoiding collisions in real time. The introduction of cables (as opposed to rigid links) enables the robotic team to travel through narrow spaces by changing its intrinsic dimensions through slack/taut switches of the cable. However, this is a challenging problem because of the hybrid mode switches and the dynamical coupling among multiple robots and the load. Previous attempts at addressing such a problem were performed offline and do not consider avoiding obstacles online. In this paper, we introduce a cascaded planning scheme with a parallelized centralized trajectory optimization that deals with hybrid mode switches. We additionally develop a set of decentralized planners per robot, which enables our approach to solve the problem of collaborative load manipulation online. We develop and demonstrate one of the first collaborative autonomy framework that is able to move a cable-towed load, which is too heavy to move by a single robot, through narrow spaces with real-time feedback and reactive planning in experiments.