 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChallenges and Outlook in Robotic Manipulation of Deformable Objects
Paper and Code
May 04, 2021
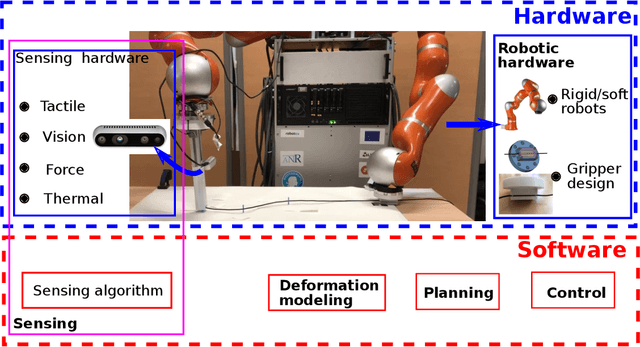
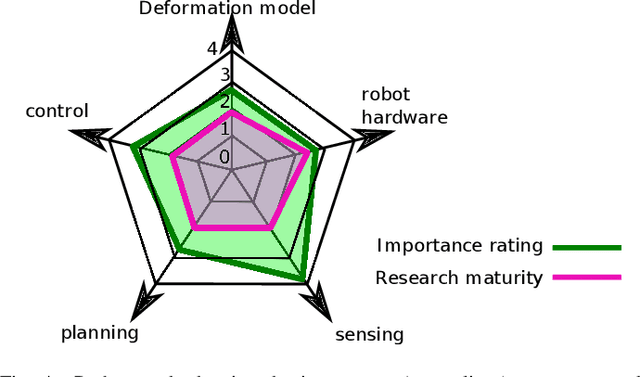
Deformable object manipulation (DOM) is an emerging research problem in robotics. The ability to manipulate deformable objects endows robots with higher autonomy and promises new applications in the industrial, services, and healthcare sectors. However, compared to rigid object manipulation, the manipulation of deformable objects is considerably more complex and is still an open research problem. Tackling the challenges in DOM demands breakthroughs in almost all aspects of robotics, namely hardware design, sensing, deformation modeling, planning, and control. In this article, we highlight the main challenges that arise by considering deformation and review recent advances in each sub-field. A particular focus of our paper lies in the discussions of these challenges and proposing promising directions of research.