 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask Tokens: A Flexible Approach to Adapting Behavior Foundation Models
Mar 28, 2025Recent advancements in imitation learning have led to transformer-based behavior foundation models (BFMs) that enable multi-modal, human-like control for humanoid agents. While excelling at zero-shot generation of robust behaviors, BFMs often require meticulous prompt engineering for specific tasks, potentially yielding suboptimal results. We introduce "Task Tokens", a method to effectively tailor BFMs to specific tasks while preserving their flexibility. Our approach leverages the transformer architecture of BFMs to learn a new task-specific encoder through reinforcement learning, keeping the original BFM frozen. This allows incorporation of user-defined priors, balancing reward design and prompt engineering. By training a task encoder to map observations to tokens, used as additional BFM inputs, we guide performance improvement while maintaining the model's diverse control characteristics. We demonstrate Task Tokens' efficacy across various tasks, including out-of-distribution scenarios, and show their compatibility with other prompting modalities. Our results suggest that Task Tokens offer a promising approach for adapting BFMs to specific control tasks while retaining their generalization capabilities.
MAMBA: an Effective World Model Approach for Meta-Reinforcement Learning
Mar 14, 2024Meta-reinforcement learning (meta-RL) is a promising framework for tackling challenging domains requiring efficient exploration. Existing meta-RL algorithms are characterized by low sample efficiency, and mostly focus on low-dimensional task distributions. In parallel, model-based RL methods have been successful in solving partially observable MDPs, of which meta-RL is a special case. In this work, we leverage this success and propose a new model-based approach to meta-RL, based on elements from existing state-of-the-art model-based and meta-RL methods. We demonstrate the effectiveness of our approach on common meta-RL benchmark domains, attaining greater return with better sample efficiency (up to $15\times$) while requiring very little hyperparameter tuning. In addition, we validate our approach on a slate of more challenging, higher-dimensional domains, taking a step towards real-world generalizing agents.
NeRN -- Learning Neural Representations for Neural Networks
Dec 27, 2022Neural Representations have recently been shown to effectively reconstruct a wide range of signals from 3D meshes and shapes to images and videos. We show that, when adapted correctly, neural representations can be used to directly represent the weights of a pre-trained convolutional neural network, resulting in a Neural Representation for Neural Networks (NeRN). Inspired by coordinate inputs of previous neural representation methods, we assign a coordinate to each convolutional kernel in our network based on its position in the architecture, and optimize a predictor network to map coordinates to their corresponding weights. Similarly to the spatial smoothness of visual scenes, we show that incorporating a smoothness constraint over the original network's weights aids NeRN towards a better reconstruction. In addition, since slight perturbations in pre-trained model weights can result in a considerable accuracy loss, we employ techniques from the field of knowledge distillation to stabilize the learning process. We demonstrate the effectiveness of NeRN in reconstructing widely used architectures on CIFAR-10, CIFAR-100, and ImageNet. Finally, we present two applications using NeRN, demonstrating the capabilities of the learned representations.
Meta Reinforcement Learning with Finite Training Tasks -- a Density Estimation Approach
Jun 21, 2022

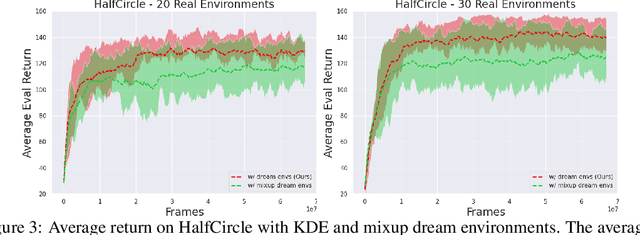

In meta reinforcement learning (meta RL), an agent learns from a set of training tasks how to quickly solve a new task, drawn from the same task distribution. The optimal meta RL policy, a.k.a. the Bayes-optimal behavior, is well defined, and guarantees optimal reward in expectation, taken with respect to the task distribution. The question we explore in this work is how many training tasks are required to guarantee approximately optimal behavior with high probability. Recent work provided the first such PAC analysis for a model-free setting, where a history-dependent policy was learned from the training tasks. In this work, we propose a different approach: directly learn the task distribution, using density estimation techniques, and then train a policy on the learned task distribution. We show that our approach leads to bounds that depend on the dimension of the task distribution. In particular, in settings where the task distribution lies in a low-dimensional manifold, we extend our analysis to use dimensionality reduction techniques and account for such structure, obtaining significantly better bounds than previous work, which strictly depend on the number of states and actions. The key of our approach is the regularization implied by the kernel density estimation method. We further demonstrate that this regularization is useful in practice, when `plugged in' the state-of-the-art VariBAD meta RL algorithm.