 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFew Clean Instances Help Denoising Distant Supervision
Sep 14, 2022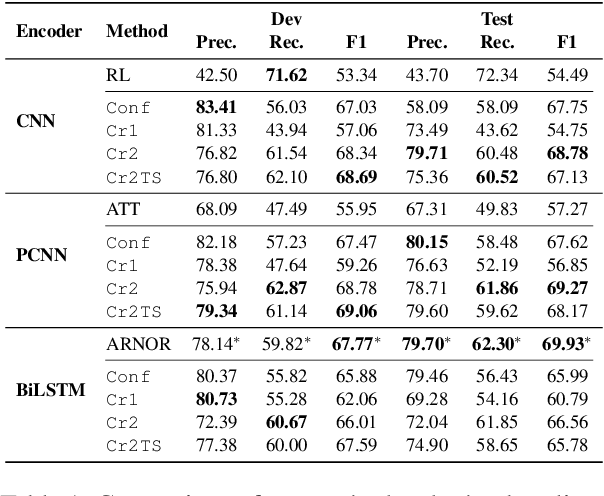
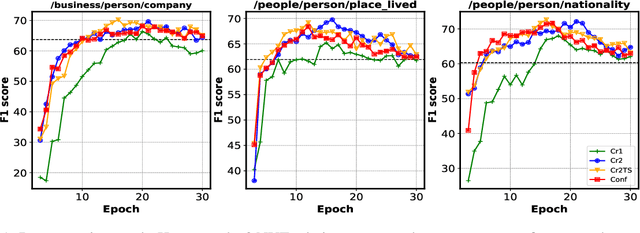
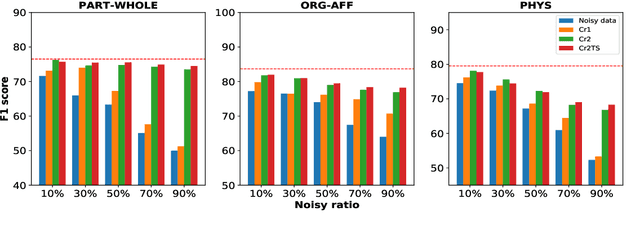

Existing distantly supervised relation extractors usually rely on noisy data for both model training and evaluation, which may lead to garbage-in-garbage-out systems. To alleviate the problem, we study whether a small clean dataset could help improve the quality of distantly supervised models. We show that besides getting a more convincing evaluation of models, a small clean dataset also helps us to build more robust denoising models. Specifically, we propose a new criterion for clean instance selection based on influence functions. It collects sample-level evidence for recognizing good instances (which is more informative than loss-level evidence). We also propose a teacher-student mechanism for controlling purity of intermediate results when bootstrapping the clean set. The whole approach is model-agnostic and demonstrates strong performances on both denoising real (NYT) and synthetic noisy datasets.
Constrained Heterogeneous Vehicle Path Planning for Large-area Coverage
Nov 22, 2019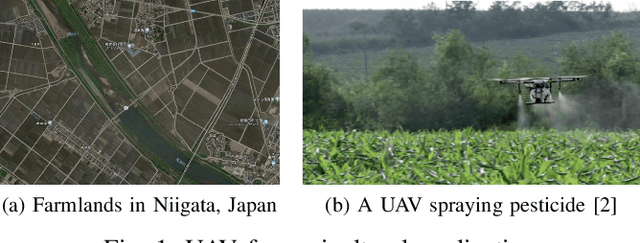

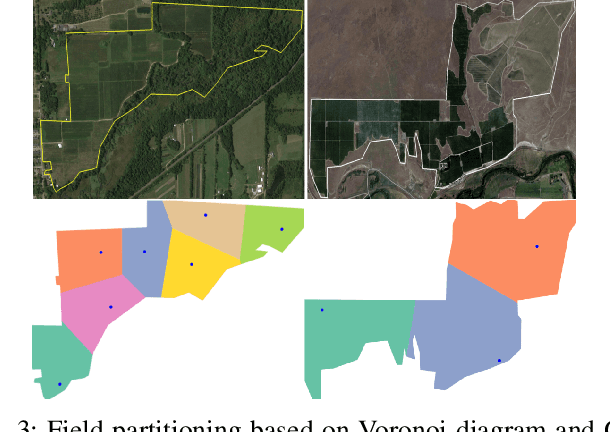
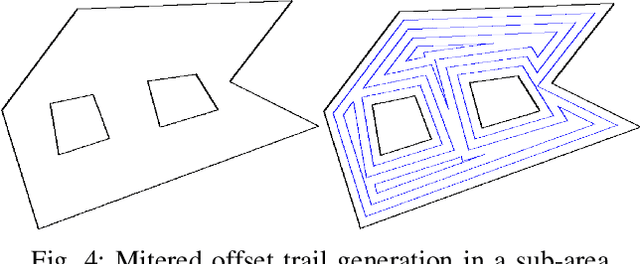
There is a strong demand for covering a large area autonomously by multiple UAVs (Unmanned Aerial Vehicles) supported by a ground vehicle. Limited by UAVs' battery life and communication distance, complete coverage of large areas typically involves multiple take-offs and landings to recharge batteries, and the transportation of UAVs between operation areas by a ground vehicle. In this paper, we introduce a novel large-area-coverage planning framework which collectively optimizes the paths for aerial and ground vehicles. Our method first partitions a large area into sub-areas, each of which a given fleet of UAVs can cover without recharging batteries. UAV operation routes, or trails, are then generated for each sub-area. Next, the assignment of trials to different UAVs and the order in which UAVs visit their assigned trails are simultaneously optimized to minimize the total UAV flight distance. Finally, a ground vehicle transportation path which visits all sub-areas is found by solving an asymmetric traveling salesman problem (ATSP). Although finding the globally optimal trail assignment and transition paths can be formulated as a Mixed Integer Quadratic Program (MIQP), the MIQP is intractable even for small problems. We show that the solution time can be reduced to close-to-real-time levels by first finding a feasible solution using a Random Key Genetic Algorithm (RKGA), which is then locally optimized by solving a much smaller MIQP.