 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHiDe-LLaVA: Hierarchical Decoupling for Continual Instruction Tuning of Multimodal Large Language Model
Mar 17, 2025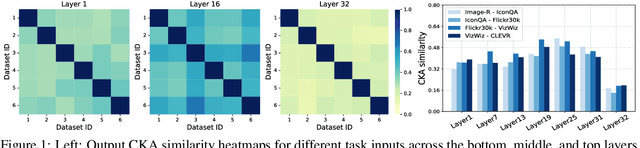
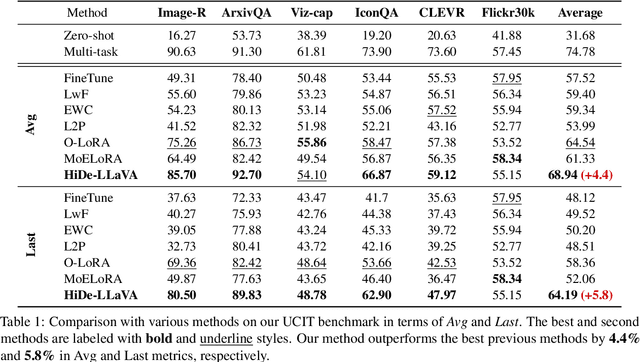
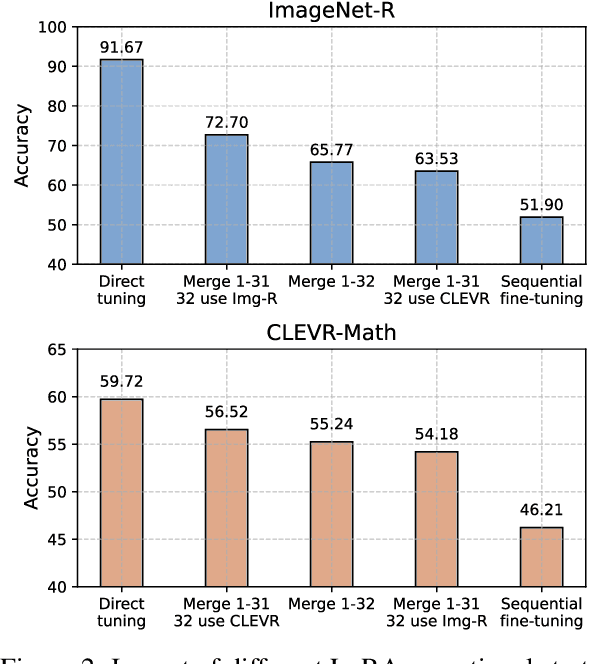
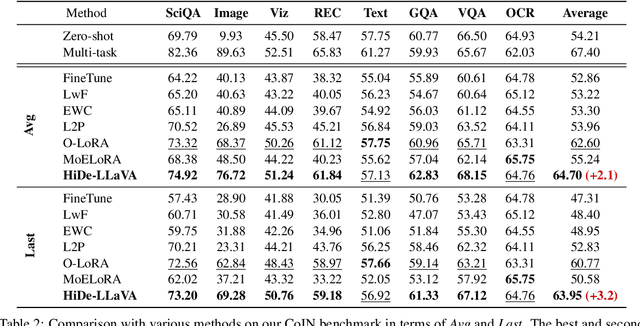
Instruction tuning is widely used to improve a pre-trained Multimodal Large Language Model (MLLM) by training it on curated task-specific datasets, enabling better comprehension of human instructions. However, it is infeasible to collect all possible instruction datasets simultaneously in real-world scenarios. Thus, enabling MLLM with continual instruction tuning is essential for maintaining their adaptability. However, existing methods often trade off memory efficiency for performance gains, significantly compromising overall efficiency. In this paper, we propose a task-specific expansion and task-general fusion framework based on the variations in Centered Kernel Alignment (CKA) similarity across different model layers when trained on diverse datasets. Furthermore, we analyze the information leakage present in the existing benchmark and propose a new and more challenging benchmark to rationally evaluate the performance of different methods. Comprehensive experiments showcase a significant performance improvement of our method compared to existing state-of-the-art methods. Our code will be public available.
ITCMA: A Generative Agent Based on a Computational Consciousness Structure
Mar 29, 2024



Large Language Models (LLMs) still face challenges in tasks requiring understanding implicit instructions and applying common-sense knowledge. In such scenarios, LLMs may require multiple attempts to achieve human-level performance, potentially leading to inaccurate responses or inferences in practical environments, affecting their long-term consistency and behavior. This paper introduces the Internal Time-Consciousness Machine (ITCM), a computational consciousness structure. We further propose the ITCM-based Agent (ITCMA), which supports behavior generation and reasoning in open-world settings. ITCMA enhances LLMs' ability to understand implicit instructions and apply common-sense knowledge by considering agents' interaction and reasoning with the environment. Evaluations in the Alfworld environment show that trained ITCMA outperforms the state-of-the-art (SOTA) by 9% on the seen set. Even untrained ITCMA achieves a 96% task completion rate on the seen set, 5% higher than SOTA, indicating its superiority over traditional intelligent agents in utility and generalization. In real-world tasks with quadruped robots, the untrained ITCMA achieves an 85% task completion rate, which is close to its performance in the unseen set, demonstrating its comparable utility in real-world settings.