 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMATTER: Multiscale Attention for Registration Error Regression
Sep 16, 2025

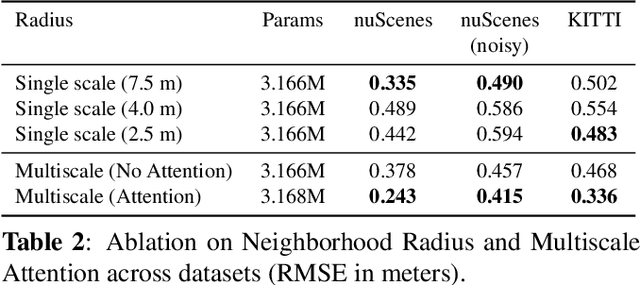

Point cloud registration (PCR) is crucial for many downstream tasks, such as simultaneous localization and mapping (SLAM) and object tracking. This makes detecting and quantifying registration misalignment, i.e.,~{\it PCR quality validation}, an important task. All existing methods treat validation as a classification task, aiming to assign the PCR quality to a few classes. In this work, we instead use regression for PCR validation, allowing for a more fine-grained quantification of the registration quality. We also extend previously used misalignment-related features by using multiscale extraction and attention-based aggregation. This leads to accurate and robust registration error estimation on diverse datasets, especially for point clouds with heterogeneous spatial densities. Furthermore, when used to guide a mapping downstream task, our method significantly improves the mapping quality for a given amount of re-registered frames, compared to the state-of-the-art classification-based method.
Continuous Normalizing Flows for Uncertainty-Aware Human Pose Estimation
May 04, 2025



Human Pose Estimation (HPE) is increasingly important for applications like virtual reality and motion analysis, yet current methods struggle with balancing accuracy, computational efficiency, and reliable uncertainty quantification (UQ). Traditional regression-based methods assume fixed distributions, which might lead to poor UQ. Heatmap-based methods effectively model the output distribution using likelihood heatmaps, however, they demand significant resources. To address this, we propose Continuous Flow Residual Estimation (CFRE), an integration of Continuous Normalizing Flows (CNFs) into regression-based models, which allows for dynamic distribution adaptation. Through extensive experiments, we show that CFRE leads to better accuracy and uncertainty quantification with retained computational efficiency on both 2D and 3D human pose estimation tasks.
CATPlan: Loss-based Collision Prediction in End-to-End Autonomous Driving
Mar 10, 2025
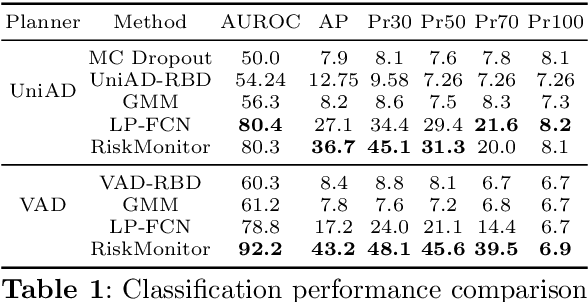

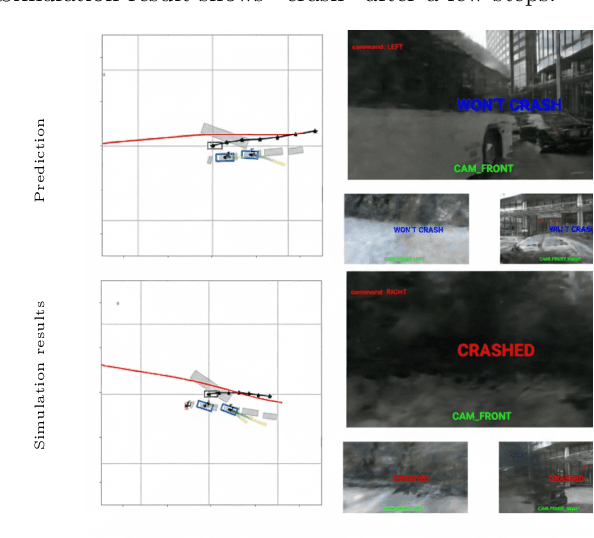
In recent years, there has been increased interest in the design, training, and evaluation of end-to-end autonomous driving (AD) systems. One often overlooked aspect is the uncertainty of planned trajectories predicted by these systems, despite awareness of their own uncertainty being key to achieve safety and robustness. We propose to estimate this uncertainty by adapting loss prediction from the uncertainty quantification literature. To this end, we introduce a novel light-weight module, dubbed CATPlan, that is trained to decode motion and planning embeddings into estimates of the collision loss used to partially supervise end-to-end AD systems. During inference, these estimates are interpreted as collision risk. We evaluate CATPlan on the safety-critical, nerf-based, closed-loop benchmark NeuroNCAP and find that it manages to detect collisions with a $54.8\%$ relative improvement to average precision over a GMM-based baseline in which the predicted trajectory is compared to the forecasted trajectories of other road users. Our findings indicate that the addition of CATPlan can lead to safer end-to-end AD systems and hope that our work will spark increased interest in uncertainty quantification for such systems.
Detail-Enhancing Framework for Reference-Based Image Super-Resolution
May 01, 2024



Recent years have witnessed the prosperity of reference-based image super-resolution (Ref-SR). By importing the high-resolution (HR) reference images into the single image super-resolution (SISR) approach, the ill-posed nature of this long-standing field has been alleviated with the assistance of texture transferred from reference images. Although the significant improvement in quantitative and qualitative results has verified the superiority of Ref-SR methods, the presence of misalignment before texture transfer indicates room for further performance improvement. Existing methods tend to neglect the significance of details in the context of comparison, therefore not fully leveraging the information contained within low-resolution (LR) images. In this paper, we propose a Detail-Enhancing Framework (DEF) for reference-based super-resolution, which introduces the diffusion model to generate and enhance the underlying detail in LR images. If corresponding parts are present in the reference image, our method can facilitate rigorous alignment. In cases where the reference image lacks corresponding parts, it ensures a fundamental improvement while avoiding the influence of the reference image. Extensive experiments demonstrate that our proposed method achieves superior visual results while maintaining comparable numerical outcomes.
Hinge-Wasserstein: Mitigating Overconfidence in Regression by Classification
Jun 01, 2023



Modern deep neural networks are prone to being overconfident despite their drastically improved performance. In ambiguous or even unpredictable real-world scenarios, this overconfidence can pose a major risk to the safety of applications. For regression tasks, the regression-by-classification approach has the potential to alleviate these ambiguities by instead predicting a discrete probability density over the desired output. However, a density estimator still tends to be overconfident when trained with the common NLL loss. To mitigate the overconfidence problem, we propose a loss function, hinge-Wasserstein, based on the Wasserstein Distance. This loss significantly improves the quality of both aleatoric and epistemic uncertainty, compared to previous work. We demonstrate the capabilities of the new loss on a synthetic dataset, where both types of uncertainty are controlled separately. Moreover, as a demonstration for real-world scenarios, we evaluate our approach on the benchmark dataset Horizon Lines in the Wild. On this benchmark, using the hinge-Wasserstein loss reduces the Area Under Sparsification Error (AUSE) for horizon parameters slope and offset, by 30.47% and 65.00%, respectively.