 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalog Beamforming Enabled Multicasting: Finite-Alphabet Inputs and Statistical CSI
May 22, 2024

The average multicast rate (AMR) is analyzed in a multicast channel utilizing analog beamforming with finite-alphabet inputs, considering statistical channel state information (CSI). New expressions for the AMR are derived for non-cooperative and cooperative multicasting scenarios. Asymptotic analyses are conducted in the high signal-to-noise ratio regime to derive the array gain and diversity order. It is proved that the analog beamformer influences the AMR through its array gain, leading to the proposal of efficient beamforming algorithms aimed at maximizing the array gain to enhance the AMR.
Small but Mighty: Enhancing 3D Point Clouds Semantic Segmentation with U-Next Framework
Apr 03, 2023



We study the problem of semantic segmentation of large-scale 3D point clouds. In recent years, significant research efforts have been directed toward local feature aggregation, improved loss functions and sampling strategies. While the fundamental framework of point cloud semantic segmentation has been largely overlooked, with most existing approaches rely on the U-Net architecture by default. In this paper, we propose U-Next, a small but mighty framework designed for point cloud semantic segmentation. The key to this framework is to learn multi-scale hierarchical representations from semantically similar feature maps. Specifically, we build our U-Next by stacking multiple U-Net $L^1$ codecs in a nested and densely arranged manner to minimize the semantic gap, while simultaneously fusing the feature maps across scales to effectively recover the fine-grained details. We also devised a multi-level deep supervision mechanism to further smooth gradient propagation and facilitate network optimization. Extensive experiments conducted on three large-scale benchmarks including S3DIS, Toronto3D, and SensatUrban demonstrate the superiority and the effectiveness of the proposed U-Next architecture. Our U-Next architecture shows consistent and visible performance improvements across different tasks and baseline models, indicating its great potential to serve as a general framework for future research.
LACV-Net: Semantic Segmentation of Large-Scale Point Cloud Scene via Local Adaptive and Comprehensive VLAD
Oct 12, 2022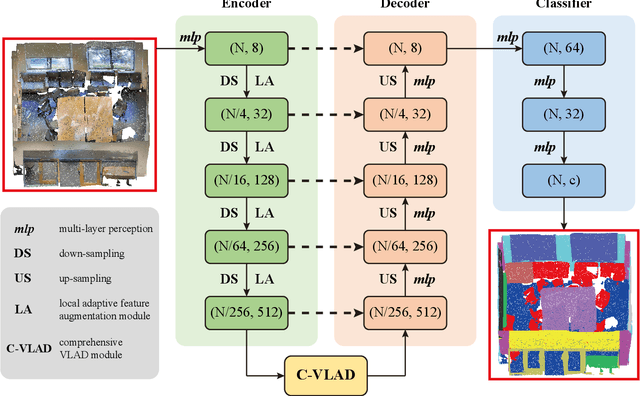
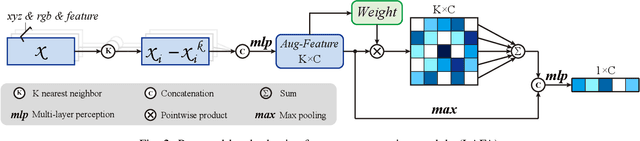
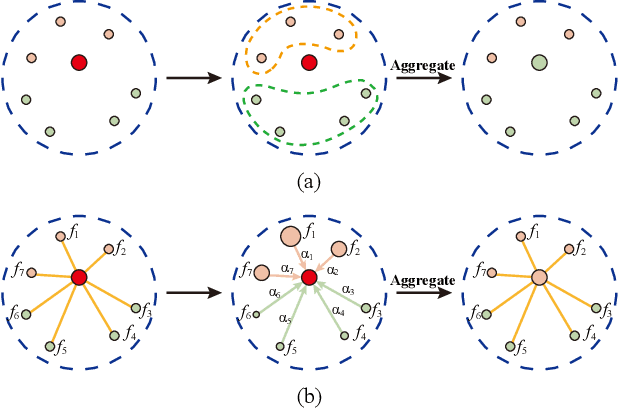
Large-scale point cloud semantic segmentation is an important task in 3D computer vision, which is widely applied in autonomous driving, robotics, and virtual reality. Current large-scale point cloud semantic segmentation methods usually use down-sampling operations to improve computation efficiency and acquire point clouds with multi-resolution. However, this may cause the problem of missing local information. Meanwhile, it is difficult for networks to capture global information in large-scale distributed contexts. To capture local and global information effectively, we propose an end-to-end deep neural network called LACV-Net for large-scale point cloud semantic segmentation. The proposed network contains three main components: 1) a local adaptive feature augmentation module (LAFA) to adaptively learn the similarity of centroids and neighboring points to augment the local context; 2) a comprehensive VLAD module (C-VLAD) that fuses local features with multi-layer, multi-scale, and multi-resolution to represent a comprehensive global description vector; and 3) an aggregation loss function to effectively optimize the segmentation boundaries by constraining the adaptive weight from the LAFA module. Compared to state-of-the-art networks on several large-scale benchmark datasets, including S3DIS, Toronto3D, and SensatUrban, we demonstrated the effectiveness of the proposed network.